För korrekt, tillförlitlig och problemfri drift av moderna kraft- och icke-elektronikprodukter är det mycket viktigt att korrekt bestämma storleken och formerna för både spänningar och strömmar som verkar i enheten. Projektets öde, ekonomiska framgångar eller misslyckanden under drift och till och med människors liv kan bero på valet av ett så till synes enkelt element som en elektrisk ström- eller spänningsmätare. Ett av de mest lämpliga alternativen för sådana mätningar (i framtiden kommer vi att försöka använda termen "konvertering", eftersom Laboratory DTiN LLC stöder åsikten att sensorer per definition inte är mätinstrument) är mätare vars funktion är baserad på Hall-effekten. Fördelarna med dessa omvandlare är frånvaron av energiförluster i den kontrollerade kretsen, galvanisk isolering mellan ingångs- och utgångskretsarna, hastighet, förmåga att arbeta i ett brett område av temperaturer och matningsspänningar, och förmågan att direkt samverka med olika övervaknings- och kontrollanordningar.
Noggrannheten hos Hall-effektströmmätare ligger i intervallet från 0,2 till 2 procent och beror först och främst på kretsen som används i konstruktionen av enheten. De används flitigt i olika elinstallationer, vanligtvis i skydds-, övervaknings- och styrkretsar, men till exempel, på grund av ett antal begränsningar, används de nästan aldrig för kommersiell elmätning. Liknande elektriska signalomvandlare kan hittas i en modern svetsmaskin, i ett hisskontrollsystem och i en bil är driften av järnvägstransporter nu otänkbar utan dessa anordningar. Enheter som arbetar med Hall-effekten kan omvandla både växelström och likström. Trots det faktum att de ofta kallas "strömtransformatorer", är detta faktum deras huvudsakliga skillnad och fördel.
Halleffekten upptäcktes för mer än 130 år sedan av den amerikanske vetenskapsmannen Edwin Hall under experiment med magnetfält. Sedan dess har denna effekt beskrivits många gånger i en mängd olika litteratur. Den är baserad på uppkomsten av en tvärgående elektrisk potentialskillnad i en ledare med likström placerad i ett magnetfält.
Vad du behöver vara uppmärksam på när du väljer en enhet för att mäta indikatorer
- Matningsspänning. För industriella mätinstrument används både bipolär (±12V, ±15V, ±18V, ±24V) och unipolär (+5, 12, 24V) strömförsörjning. Dess val beror både på utvecklarens kapacitet och behov och på förhållandena för gränssnittet med övervaknings- och kontrollenheter.
- Omvandlingsnoggrannhet. Som vi redan har nämnt har befintliga mätare som arbetar med Edwin Hall-effekten en noggrannhet på 0,2 till 2 procent, medan denna parameter vanligtvis bestäms av hur själva mätaren är uppbyggd - med hjälp av en direktförstärkningskrets eller en kompensationskrets, med 100 % respons. Som i de flesta fall är en mer noggrann mätanordning av kompensationstyp för samma märkström dyrare än dess motsvarighet monterad med en direktförstärkningskrets, som regel har större dimensioner och definitivt större förbrukning av elektrisk ström från strömkällan . Dess fördelar kommer inte bara att vara större noggrannhet, som vi redan har nämnt, utan bättre linjäritet och brusimmunitet.
- Omvandlingsintervall. Sådana konstruktioner är kapabla att omvandla en insignal till en proportionell utgång eller motsvarande digital signal strömstyrka från flera hundra milliampere till flera tusen ampere. Naturligtvis är en liknande mekanism med 10kA eller mer dyrare än sin 25A motsvarighet
- Ram. Dessa enheter kan ha Olika typer byggnader. Det finns alternativ för installation på tryckt kretskort, chassi eller DIN-skena.
- Temperaturen vid vilken dessa moduler kan fungera korrekt. Ja, reducerat arbetstemperatur för mätinstrument som arbetar med ström och spänning, som regel -40 C, men det finns produkter som förblir i drift vid -50 och till och med -55 C. Den ökade driftstemperaturen för de flesta moderna produkter når +85C det finns prover som fungerar vid +105C.
Klassificering av omvandlare enligt konstruktionsprincipen.
- Direktförstärkningsomvandlare. Fördelar - kompakt storlek, låg strömförbrukning, förmåga att arbeta med elektriska signaler från enheter på ampere till tiotals kiloampere, lågt pris. De används för att arbeta med signaler i frekvensområdet från likström till 25, mer sällan 50 kHz. Konverteringsfel och olinjäritet inom några få procent. Denna typ av produkt har en hög överbelastningskapacitet, är relativt billig och kompakt.
- Mätare med 100 % återkoppling, även känd som "kompensations"- eller "nollflödes"-sensorer. Som namnet antyder är dess främsta utmärkande drag närvaron av en krets sluten längs det magnetiska flödet. Sådana enheter används för att omvandla en primär signal från hundratals milliampere till tiotals kiloampere, oavsett form och frekvens, med början från likström och slutar på nivån 100-150-200 kHz. Kkännetecknas av bättre noggrannhet, linjäritet och motstånd mot externa magnetfält. Konverteringsintervallet för dessa instrument är lägre än direktförstärkningsdesigner
- Spänningssensor. En typ av kompensationsanordning för en elektrisk signalomvandlaranordning, kännetecknad av närvaron av en inbyggd primärlindning med stor mängd vänder. Spänningsmätning sker genom omvandling av en liten primärsignal (vanligtvis vid en nominell spänning på 5 eller 10 mA, valet beror på konstruktören), specificerad av ett motstånd kopplat i serie med primärspolen, till en proportionell utsignal. Dessa enheter har ett ganska brett utbud ingångsspänningar, men har begränsningar för insignalens frekvens, eftersom primärlindningen har betydande induktans.
- Relativt ny typ omvandlare - integrerad, är en utveckling av den direkta förstärkningskretsen. Fördelar: små dimensioner, lågt pris. Från starten 1879 till i dag enheter som arbetar med effekten upptäckt av Edwin Hall har förändrats mycket, mycket märkbart. Noggrannheten och tillförlitligheten har ökat, temperaturstabiliteten har förbättrats avsevärt, och dimensionerna och priserna på dessa mekanismer minskar stadigt. Alla dessa förbättringar blev möjliga som ett resultat av utvecklingen av teknik i produktionen elektroniska komponenter, och som ett resultat av nya krav för denna produktklass. De används allt mer i modernt liv mättad med elektroniska och elektriska apparater.
Modern industri ställer särskilda krav på tillförlitligheten och stabiliteten hos elektriska dataomvandlare som används för övervakning och styrning de mest komplexa systemen. Detta tvingar oss att fortsätta att förbättra designen av enheter, förbättra deras tekniska egenskaper, göra dem mer och mer pålitliga, enkla och lätta att använda.
Som regel går en nybörjare till extremer, ställer in en noggrannhet på inte sämre än 0,1% och frekvenssvar från 100 kHz och sedan är han länge förvånad över att den lösning som föreslås honom kostar pengar jämförbart med priset för hälften, eller till och med hela hans utveckling. I majoriteten moderna applikationer genom att förbättra parametrarna för effekthalvledare visar sig en noggrannhet på 1-2% vara mer än tillräckligt, och nyckelfaktorn för att välja omvandlare blir tillförlitlighet och stabilitet, men dessa frågor är inte direkt relaterade till kretsdesign och är värda att separeras. hänsyn.
MätteknikHallelement strömgivare
Funktionsdiagrammet för en strömsensor av kompensationstyp visas i fig. 1 Det magnetfältskänsliga Hall-elementet är placerat i gapet i ringmagnetkretsen.

Den uppmätta strömmen Imeas, som flyter genom lindningen I, skapar ett magnetiskt flöde i den magnetiska kretsen, vilket inducerar en EMF proportionell mot denna ström i det Hall-känsliga elementet. Signalen som tas från elementet, efter förstärkning, skickas till kompensationslindning II. Strömmen Ik som flyter genom det skapar ett magnetiskt flöde i motsatt riktning i magnetkretsen. Det magnetiska systemet, Hall-elementet och förstärkaren bildar en negativ återkopplingsslinga som upprätthåller jämlikhet
![]()
där W1 och W|| - antal varv av lindningar I och II Motstånd R1 anslutna i serie med lindning II omvandlar kompensationsströmmen till utspänning sensor Om du väljer att motståndet för detta motstånd i ohm ska vara numeriskt lika med förhållandet mellan antalet varv av lindning II

till antalet varv av lindningen I, kommer utspänningen i volt att bli numeriskt lika med den uppmätta strömmen i ampere
Måttritningen för DHC-0.5A Hall-elementet som används i sensorn visas i Fig. 2 Hallspänning proportionell mot styrström och induktion magnetiskt fält, mätt mellan +U och -U terminalerna. Elementets känslighet vid en nominell styrström på 3 mA (strömmar in i +I-uttaget och flyter ut från -I-uttaget) är 280 mV / T. Den angivna spänningspolariteten och strömriktningen motsvarar den magnetiska induktionsvektorn B, riktad som visas i fig. 2 pil. Den resterande utspänningen (i frånvaro av ett magnetfält) överstiger inte 7 mV Ingångsresistans (mellan terminaler I) är 1,8...3 kOhm, utgångsresistans (mellan terminaler U) är inte mer än 3 kOhm.

Om det finns ett Hall-element med okänd känslighet, kan det bestämmas experimentellt genom att placera elementet i ett luftgap med längden d i vilken magnetisk krets som helst på vilken ett känt antal varv W av någon tråd är lindad. En styrströmkälla är ansluten till elementets "aktuella" terminaler, och en millivoltmeter är ansluten till de andra två. En likström I leds genom lindningen. Känslighet (mV/T) är kvoten för att dividera millivoltmeteravläsningarna med den magnetiska induktionen, beräknad med formeln.
![]()
Strömsensorkretsen visas i fig. 3 Det magnetiska systemet är avbildat som en transformator T1, i gapet i den magnetiska kretsen i vilken ett Hall-element B1 är insatt. Förstärkaren är sammansatt med hjälp av op-amp DA1 och transistorer VT2, VT3. Strömstabilisatorn på transistorn VT1 ställer in styrströmmen som flyter genom Hall-elementet.
En bipolär källa krävs för att driva sensorn DC spänning+/-15 V Huvudförbrukaren av dess energi är lindning II på transformator T1. I den beskrivna designen är lindningarna lindade på en ferritring från datorns strömförsörjning. Lindning II - 1000 varv av PEV-2-tråd med en diameter på 0,15 mm Lindning 1 - 10 varv av isolerad monteringstråd med ett tvärsnitt på 0,35 mm2 lindas ovanpå. En luftspalt 2 mm lång är gjord i ringen - den är lika med tjockleken på Hall-elementet limmat i gapet

Det bör noteras att den magnetiska ledaren inte behöver vara ferrit; den kan vara gjord av vilket som helst ferromagnetiskt material. Den optimala tvärsnittsarean för den magnetiska ledaren är 10...12 mm2. Du bör inte sträva efter att öka tvärsnittet Detta kommer att leda till en ökning av längden på varven på kompensationslindningen och följaktligen. dess motstånd Av samma anledning bör en tråd med största möjliga diameter väljas för kompensationslindningen.

Den tillverkade sensorn visas i fig. 4, och dess överföringskarakteristik visas i fig. 5 Den togs medan man mätte en sinusformad ström med en frekvens på 50 Hz. De effektiva värdena för ström och spänning plottas längs grafens axlar. Det fanns inget motstånd R4 i enheten. som gav en ström-till-spänning-omvandlingskoefficient på 1 V/A, konstant inom området för uppmätta strömvärden 0,25...6 A.
Brott mot linjäriteten hos karakteristiken vid låg ström förklaras av det faktum att effektförstärkaren på transistorerna VT2 och VT3 fungerar i klass B utan en initial förspänning. Anledningen till olinjäritet vid stora strömvärden är begränsningen av signalen i K140UD7 op-amp, som ett resultat av vilken formen på kompensationsströmmen inte längre sammanfaller med formen på den uppmätta och full kompensation av magnetiska flöden i den magnetiska kretsen inte förekommer.
Genom att installera samma motstånd R4 parallellt med motstånd R3 var det möjligt att göra karakteristiken linjär vid mätning av ström upp till 10 A. Omvandlingskoefficienten minskade dock till 0,5 V/A.
Hej alla!
Det kanske är värt att presentera dig själv lite - jag är en vanlig kretsingenjör som också är intresserad av programmering och några andra områden inom elektronik: DSP, FPGA, radiokommunikation och några andra. I Nyligen Jag dök med huvudet först in i SDR-mottagare. Jag ville först ägna min första artikel (hoppas inte min sista) åt något mer seriöst ämne, men för många blir det bara läsmaterial och kommer inte att vara användbart. Därför är det valda ämnet mycket specialiserat och tillämpas exklusivt. Jag vill också notera att förmodligen kommer alla artiklar och frågor i dem att betraktas mer från sidan av en kretsdesigner, snarare än en programmerare eller någon annan. Nåväl, låt oss gå!
För inte så länge sedan fick jag i uppdrag att designa ett "System för att övervaka energiförsörjningen i ett bostadshus." Denna apparat uppmätt strömförbrukning på varje ingångsfas och spänning, skickar samtidigt data via radiokanal till det redan installerade systemet " Smart hus"+ visste hur man stänger av startmotorn vid ingången till huset. Men idag kommer vi inte att prata om det, utan om dess lilla men mycket viktiga komponent - den nuvarande sensorn. Och som du redan förstått från artikelns titel kommer dessa att vara "kontaktlösa" strömsensorer från Allegro-företaget - ACS758-100.
________________________________________________________________________________________________________________________
Du kan titta på databladet för sensorn jag kommer att prata om. Som du kanske gissar är siffran "100" i slutet av markeringen den maximala ström som sensorn kan mäta. För att vara ärlig, jag tvivlar på detta, det verkar för mig att terminalerna helt enkelt inte kommer att tåla 200A under lång tid, även om det är ganska lämpligt för att mäta inströmmen. I min enhet passerar en 100A-sensor hela tiden minst 35A utan problem + det finns förbrukningstoppar på upp till 60A.
Figur 1 - Utseende på ACS758-100(50/200) sensor
Innan jag går vidare till huvuddelen av artikeln föreslår jag att du bekantar dig med två källor. om du har grundläggande kunskap inom elektronik kommer de att vara överflödiga och hoppa gärna över det här stycket. För övrigt råder jag dig att gå över för allmän utveckling och förståelse:
1) Halleffekt. Fenomen och funktionsprincip
2) Moderna strömsensorer
________________________________________________________________________________________________________________________
Nåväl, låt oss börja med det viktigaste, nämligen märkningen. Jag köper komponenter 90 % av tiden på www.digikey.com. Komponenter kommer till Ryssland om 5-6 dagar, webbplatsen har förmodligen allt, det finns också en mycket bekväm parametrisk sökning och dokumentation. Så full lista sensorer från familjen kan ses där på begäran " ACS758"Mina sensorer köptes där - ACS758LCB-100B.
Allt är markerat inuti databladet, men jag kommer fortfarande att uppmärksamma nyckelpunkten" 100V":
1) 100
- detta är mätgränsen i ampere, det vill säga min sensor kan mäta upp till 100A;
2) "I" - detta brev är värt att ägna särskild uppmärksamhet åt; istället för det kan det också finnas bokstaven " U". Mätare med bokstav B kan mäta växelström och följaktligen likström. Sensor med bokstav U kan bara mäta likström.
Det finns också ett utmärkt tecken på detta ämne i början av databladet: 
Figur 2 - Typer av strömsensorer i ACS758-familjen
En av de viktigaste anledningarna till att använda en sådan sensor var också - galvanisk isolering. Strömstift 4 och 5 är inte elektriskt anslutna till stift 1,2,3. I denna sensor sker kommunikationen endast i form av ett inducerat fält.
En annan dök upp i den här tabellen viktig parameter- utgångsspänningens beroende av ström. Härlig av denna typ sensorer är att de har en spänningsutgång, inte en strömutgång som klassiska strömtransformatorer, vilket är väldigt bekvämt. Till exempel kan sensorutgången anslutas direkt till ADC-ingång mikrokontroller och ta avläsningar.
För min sensor är detta värde 20 mV/A. Detta innebär att när en ström på 1A flyter genom plintarna 4-5 på sensorn kommer spänningen vid dess utgång att öka med 20 mV. Jag tror att logiken är klar.
Nästa punkt är vilken spänning kommer att vara vid utgången? Med tanke på att strömförsörjningen är "mänsklig", det vill säga unipolär, måste det vid mätning av växelström finnas en "referenspunkt". I denna sensor är denna referenspunkt 1/2 av matningen (Vcc). Denna lösning händer ofta och det är bekvämt. När ström flyter i en riktning blir utsignalen " 1/2 Vcc + I*0,02V", i en annan halvcykel, när strömmen flödar in baksidan utgångsspänningen blir smalare 1/2 Vcc - I*0,02V". Vid utgången får vi en sinusform, där "noll" är 1/2Vcc. Om vi mäter likström, kommer vi vid utgången att ha " 1/2 Vcc + I*0,02V", sedan när vi bearbetar data på ADC subtraherar vi helt enkelt den konstanta komponenten 1/2 Vcc och arbeta med sann data, det vill säga med resten I*0,02V.
Nu är det dags att i praktiken testa det jag beskrev ovan, eller snarare det jag läste i databladet. För att arbeta med sensorn och testa dess kapacitet byggde jag detta "mini-stativ":

Figur 3 - Testområde för strömsensor
Först och främst bestämde jag mig för att lägga på ström till sensorn och mäta dess uteffekt för att se till att den anses vara "noll" 1/2 Vcc. Anslutningsschemat finns i databladet, men jag, bara för att bekanta mig, slösade inte bort tid och skulpterade en filterkondensator för strömförsörjningen + RC lågpassfilterkrets vid Vout-stiftet. I en riktig enhet finns det ingenstans utan dem! Jag slutade med den här bilden:

Figur 4 - Resultat av "noll"-mätning
När ström tillförs 5V från min halsduk STM32VL-Discovery Jag såg dessa resultat - 2,38V. Den första frågan som dök upp: " Varför 2.38 och inte 2.5 som beskrivs i databladet?"Frågan försvann nästan omedelbart - jag mätte strömbussen under felsökningen, och det var 4,76-4,77V. Men poängen är att mat kommer med USB finns det redan 5V, efter USB finns det en linjär stabilisator LM7805, och detta är helt klart inte en LDO med 40 mV drop. Här är det ungefär 250 mV som sjunker. Tja, okej, det här är inte kritiskt, det viktigaste är att veta att "noll" är 2,38V. Det är denna konstant som jag kommer att subtrahera när jag bearbetar data från ADC.
Låt oss nu ta den första mätningen, för närvarande använder vi bara ett oscilloskop. Jag kommer att mäta kortslutningsströmmen för min reglerade strömförsörjning, den är lika med 3,06A. Den inbyggda amperemetern visar detta och flödet gav samma resultat. Nåväl, låt oss ansluta strömförsörjningsutgångarna till ben 4 och 5 på sensorn (på bilden har jag en tråd inkastad) och se vad som hände:

Figur 5 - Mätning av kortslutningsström i nätaggregatet
Som vi kan se är spänningen Voutökade från 2,38V till 2,44V. Om vi tittar på beroendet ovan så borde vi ha fått 2,38V + 3,06A*0,02V/A, vilket motsvarar ett värde på 2,44V. Resultatet motsvarar förväntningarna vid en ström på 3A fick vi en ökning till "noll" lika med 60 mV. Slutsats - sensorn fungerar, du kan redan arbeta med den med MK.
Nu måste du ansluta en strömsensor till ett av ADC-stiften på STM32F100RBT6 mikrokontroller. Själva småstenen är väldigt medioker, systemets frekvens Endast 24 MHz, men den här halsduken har gått igenom mycket och har bevisat sig själv. Jag har förmodligen ägt den i ungefär 5 år nu, eftersom jag fick den gratis vid en tidpunkt då ST:er delades ut till vänster och höger.
Först ville jag, av vana, installera en op-amp med en koefficient efter sensorn. gain "1", men när jag tittade på blockdiagrammet insåg jag att det redan var inne. Det enda som är värt att tänka på är att vid maximal ström kommer uteffekten att vara lika med strömförsörjningen för Vcc-sensorn, det vill säga cirka 5V, och STM kan mäta från 0 till 3,3V, så i det här fallet är det nödvändigt att installera en resistiv spänningsdelare, till exempel 1:1,5 eller 1:2. Min ström är knapp, så jag försummar detta ögonblick för tillfället. Min testenhet ser ut ungefär så här:

Figur 6 - Montering av vår "amperemeter"
Dessutom, för att visualisera resultaten, skruvade jag fast en kinesisk skärm på ILI9341-kontrollern, lyckligtvis låg den runt, men mina händer kunde bara inte nå den. För att skriva ett fullfjädrat bibliotek åt honom slog jag ihjäl ett par timmar och en kopp kaffe, lyckligtvis visade sig databladet vara förvånansvärt informativt, vilket är sällsynt för hantverk av Jackie Chans söner.
Nu måste vi skriva en funktion för att mäta Vout med hjälp av mikrokontroller ADC. Jag kommer inte att gå in på detaljer; det finns redan massor av information och lektioner om STM32. Så titta bara:
Uint16_t get_adc_value() (ADC_SoftwareStartConvCmd(ADC1, ENABLE); while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); returnera ADC_GetConversionValue(ADC1); )
Därefter, för att få resultaten av att mäta ADC i den körbara koden för huvudkroppen eller avbrottet, måste du skriva följande:
Data_adc = get_adc_value();
Efter att tidigare ha deklarerat data_adc-variabeln:
Extern uint16_t data_adc;
Som ett resultat får vi variabeln data_adc, som tar ett värde från 0 till 4095, eftersom ADC i STM32 är 12 bitar. Därefter måste vi konvertera resultatet som erhålls "i papegojor" till en mer bekant form för oss, det vill säga till ampere. Därför är det nödvändigt att först beräkna delningspriset. Efter stabilisatorn på 3,3V-bussen visade mitt oscilloskop 3,17V, jag brydde mig inte om att ta reda på vad detta var kopplat till. Därför, dividera 3,17V med 4095, får vi värdet 0,000774V - detta är divisionspriset. Det vill säga, efter att ha fått ett resultat från ADC, till exempel 2711, multiplicerar jag det helt enkelt med 0,000774V och får 2,09V.
I vår uppgift är spänning bara en "mediator" vi behöver fortfarande omvandla den till ampere. För att göra detta måste vi subtrahera 2,38V från resultatet och dividera resten med 0,02 [V/A]. Resultatet är denna formel:
Float I_out = ((((float)data_adc * presc)-2.38)/0.02);
Tja, det är dags att ladda upp firmware till mikrokontrollern och se resultaten:

Figur 7 - Resultat av mätdata från sensorn och deras bearbetning
Jag mätte kretsens egen förbrukning, som du kan se 230 mA. Efter att ha mätt samma sak med ett verifierat flöde visade det sig att förbrukningen var 201 mA. Tja, noggrannheten med en decimal är redan väldigt cool. Jag ska förklara varför... Området för uppmätt ström är 0..100A, det vill säga noggrannhet upp till 1A är 1%, och noggrannhet upp till tiondels ampere är redan 0,1%! Och observera, detta är utan några kretslösningar. Jag var till och med för lat för att hänga upp strömförsörjningsfiltren.
Nu måste jag mäta kortslutningsströmmen (SC) för min strömkälla. Jag vrider ratten maximalt och får följande bild:

Figur 8 - Kortslutningsströmmätningar
Tja, faktiskt avläsningarna på själva källan med dess ursprungliga amperemeter:

Figur 9 - Värde på BP-skalan
Faktum är att den visade 3.09A, men medan jag tog bilder värmdes spolen upp och dess motstånd ökade, och strömmen föll följaktligen, men det är inte så illa.
Sammanfattningsvis vet jag inte ens vad jag ska säga. Jag hoppas att min artikel på något sätt kommer att hjälpa nybörjare radioamatörer på deras svåra resa. Kanske kommer någon att gilla mitt sätt att presentera materialet, då kan jag fortsätta att periodvis skriva om att arbeta med olika komponenter. Du kan uttrycka dina önskemål om ämnet i kommentarerna, jag ska försöka ta hänsyn till det.
Innehåll:För att framgångsrikt automatisera olika tekniska processer, effektivt hantera instrument, enheter, maskiner och mekanismer måste du ständigt mäta och kontrollera många parametrar och fysiska kvantiteter. Därför en integrerad del automatiska system sensorer har blivit tillgängliga för att ge information om tillståndet för kontrollerade enheter.
I sin kärna är varje sensor integrerad del reglerings-, signalerings-, mät- och styranordningar. Med dess hjälp omvandlas en eller annan kontrollerad kvantitet till viss typ signal som låter dig mäta, bearbeta, spela in, sända och lagra mottagen information. I vissa fall kan sensorn påverka kontrollerade processer. Strömsensorn som används i många enheter och mikrokretsar har alla dessa egenskaper. Den omvandlar effekterna av elektrisk ström till signaler som är bekväma för vidare användning.
Sensorklassificering
Sensorer som används i olika enheter klassificeras enligt vissa egenskaper. Om det är möjligt att mäta inmatade kvantiteter kan de vara: elektriska, pneumatiska, hastighetssensorer, mekaniska rörelser, tryck, acceleration, kraft, temperaturer och andra parametrar. Bland dem tar mätningen av elektriska och magnetiska storheter cirka 4%.
Varje sensor omvandlar ett ingångsvärde till någon utdataparameter. Beroende på detta, kontrollanordningar kan vara icke-elektriska och elektriska.
Bland de senare är de vanligaste:
- DC-sensorer
- AC amplitudsensorer
- Motståndssensorer och andra liknande enheter.
Den största fördelen med elektriska sensorer är förmågan att överföra information över vissa avstånd med hög hastighet. Användningen av en digital kod säkerställer hög noggrannhet, hastighet och ökad känslighet hos mätinstrument.
Funktionsprincip
Enligt funktionsprincipen är alla sensorer indelade i två huvudtyper. De kan vara generatorer - direkt omvandlar ingångskvantiteter till en elektrisk signal. Parametriska sensorer inkluderar enheter som omvandlar inmatade kvantiteter till ändrade elektriska parametrar för själva sensorn. Dessutom kan de vara reostatiska, ohmska, fotoelektriska eller optoelektroniska, kapacitiva, induktiva, etc.
Alla sensorer har vissa krav på sin funktion. I varje enhet måste ingångs- och utmatningsmängderna vara direkt beroende av varandra. Alla egenskaper måste vara stabila över tiden. Som regel kännetecknas dessa enheter av hög känslighet, liten storlek och vikt. De kan fungera i en mängd olika miljöer och installeras på en mängd olika sätt.
Moderna strömsensorer
Strömsensorer är enheter som används för att bestämma styrkan på lik- eller växelström i elektriska kretsar. Deras design inkluderar en magnetisk kärna med ett gap och en kompensationslindning, samt ett elektroniskt kort som behandlar elektriska signaler. Det huvudsakliga känsliga elementet är en Hall-sensor, fixerad i gapet i den magnetiska kretsen och ansluten till förstärkarens ingång.
Funktionsprincipen är i allmänhet densamma för alla liknande enheter. Under påverkan av den uppmätta strömmen uppstår ett magnetfält, sedan genereras motsvarande spänning med hjälp av en Hall-sensor. Denna spänning förstärks sedan vid utgången och appliceras på utgångslindningen.
Huvudtyper av strömsensorer:

Direktförstärkningssensorer (O/L). De är små i storlek och vikt och har låg energiförbrukning. Utbudet av signalomvandlingar har utökats avsevärt. Låter dig undvika förluster i primärkretsen. Funktionen av enheten är baserad på ett magnetfält som skapar en primärström IP. Därefter koncentreras magnetfältet i magnetkretsen och dess vidare transformation av Hall-elementet i luftgapet. Signalen som tas emot från Hall-elementet förstärks och en proportionell kopia av primärströmmen bildas vid utgången.

Strömsensorer (Eta). De kännetecknas av ett brett frekvensområde och ett utökat omvandlingsområde. Fördelarna med dessa enheter är låg strömförbrukning och låg latens. Driften av enheten stöds av en unipolär strömförsörjning från 0 till +5 volt. Driften av enheten är baserad på en kombinerad teknik som använder kompensationstyp och direkt förstärkning. Detta resulterar i avsevärt förbättrad sensorprestanda och mer balanserad drift.

Kompenserande strömsensorer (C/L). Har ett brett frekvensområde, Hög precision och låg latens. Enheter av denna typ har ingen förlust av den primära signalen utmärkta egenskaper linjäritet och låg temperaturdrift. Kompensation av magnetfältet som skapas av primärströmmen IP, uppstår på grund av samma fält som bildas i sekundärlindningen. Genereringen av sekundär kompensationsström utförs av Hall-elementet och själva sensorns elektronik. I slutändan är sekundärströmmen en proportionell kopia av primärströmmen.

Kompenserande strömsensorer (typ C). De otvivelaktiga fördelarna med dessa enheter är ett brett frekvensområde, hög informationsnoggrannhet, utmärkt linjäritet och reducerad temperaturdrift. Dessutom kan dessa instrument mäta restströmmar (CD). De har höga nivåer isolering och minskad påverkan på primärsignalen. Designen består av två toroidformade magnetiska kärnor och två sekundärlindningar. Funktionen av sensorerna är baserad på ampere-varvkompensation. Liten ström från primärkretsen passerar genom primärmotståndet och primärlindningen.

PRIME strömsensorer. För att konvertera växelström, ett brett utbud av dynamiskt omfång. Enheten kännetecknas av god linjäritet, obetydliga temperaturförluster och frånvaron av magnetisk mättnad. Fördelen med designen är dess små dimensioner och vikt, hög motståndskraft mot olika typeröverbelastningar Avläsningarnas noggrannhet beror inte på hur kabeln är placerad i hålet och påverkas inte av yttre fält. Denna sensor använder inte en traditionell öppen kretsspole, utan snarare ett sensorhuvud med sensortryckta kretskort. Varje bräda består av två separata luftkärnspolar. Alla är monterade på ett enda kretskort. Två koncentriska kretsar bildas av sensorkorten, vid vars utgångar den inducerade spänningen summeras. Som ett resultat erhålls information om parametrarna för amplituden och fasen för den uppmätta strömmen.

Strömsensorer (typ IT). Kännetecknas av hög noggrannhet av avläsningar, bred frekvensomfång, lågt ljud utsignal, hög temperaturstabilitet och låg överhörningsdistorsion. Utformningen av dessa sensorer innehåller inte Hall-element. Primärströmmen skapar ett magnetfält, som sedan kompenseras av sekundärströmmen. Vid utgången är sekundärströmmen en proportionell kopia av primärströmmen.
Fördelar med strömsensorer i moderna kretsar
Aktuella sensorchips spelar en stor roll för energibesparing. Detta underlättas av låg effekt- och energiförbrukning. Integrerade kretsar kombinerar alla nödvändiga elektroniska komponenter. Enheternas egenskaper förbättras avsevärt tack vare arbetar tillsammans magnetfältssensorer och all annan aktiv elektronik.

Moderna sensorer ström bidrar till ytterligare minskning i storlek, eftersom all elektronik är integrerad i en singel vanligt chip. Detta har lett till ny innovativ kompakt designlösningar, inklusive de som avser den primära bussen. Varje ny strömsensor har ökat isoleringen och interagerar framgångsrikt med andra typer av elektroniska komponenter.
De senaste sensordesignerna gör att de kan monteras in befintliga installationer utan att koppla bort primärledaren. De består av två delar och är löstagbara, vilket gör att dessa delar enkelt kan installeras på primärledaren utan några frånkopplingar.
Varje sensor har teknisk dokumentation, som återspeglar all nödvändig information som gör att preliminära beräkningar kan göras och platsen för den mest optimala användningen kan bestämmas.
Företag Texas instrument Och Honeywell erbjudande Hallsensorer med ultralåg strömförbrukning För kompakta applikationer med autonom strömförsörjning. Modeller tillgängliga för att bestämma en fast position objekt och för att mäta hans rörelse. Vilka är skillnaderna mellan TI- och Honeywell-sensorer, och vilken modell? skulle passa bättre i ett eller annat fall?
Att överföra till elschema För att få information om positionen för olika rörliga element, såsom axlar, dämpare, kåpor och elektriska motorrotorer, utvecklades specialiserade enheter som kallas positionssensorer på en gång. Det finns sensorer baserade på elektromekaniska, kapacitiva, induktiva, ultraljuds-, magnetiska eller optiska driftsprinciper, såväl som många kombinerade enheter. Varje typ av sensor har specifika fördelar och nackdelar och har sitt eget användningsområde. Under de senaste decennierna har listan över typer av positionssensorer kompletterats med ytterligare en typ – sensorer baserade på Hall-effekten.
De utmärkande egenskaperna hos modern elektronik är kompakthet och effektivitet. Och om Hall-sensorer aldrig har haft några speciella problem med kompakthet, så var det tills nyligen inte lätt med effektivitet: på grund av tillkomsten av ekonomiska elektroniska enheter, vilket gör att enheten kan fungera i flera år från ett enda element litiumbatteri, även en liten strömförbrukning för en konventionell Hall-sensor ger redan ett betydande bidrag till systemets totala energiförbrukning.
Därför har nyligen ledande tillverkare av elektroniska komponenter, inklusive Texas instrument Och Honeywell, introducerade en ny typ av positionssensorer baserade på Hall-effekten, kännetecknad av ökad effektivitet. En nyckelfunktion hos dessa IC:er är deras ultralåga självströmförbrukning, vilket tillsammans med deras kompakta storlek och höga känslighet gör dem idealiska för kompakta batteridrivna applikationer som t.ex. trådlösa sensorer säkerhetssystem, Internet of things-enheter och andra system.
Funktioner hos diskreta Hall-sensorer med låg effekt
Det finns linjära och diskreta Hall-sensorer (Figur 1). Utgångssignaler linjära sensorer proportionell mot magnituden av magnetisk induktion. Det huvudsakliga tillämpningsområdet för sådana enheter är magnetiska fältstyrkemätare, konstanta och växelströmmar(Figur 2), beröringsfria potentiometrar, rotationsvinkelsensorer och andra applikationer som arbetar med kontinuerliga signaler. Förutom förstärkar- och temperaturkompensationskretsar kan mikrokretsar, beroende på deras specialisering, innehålla många andra komponenter, till exempel ADC, larmkomparatorer för aktivering av den centrala mikrokontrollern, styrenheter för populära dataöverföringsgränssnitt (USART, I 2 C, SPI och andra), och även icke-flyktigt minne för lagring av inställningar.

När det absoluta värdet av magnetfältsinduktionen inte spelar någon roll, och det är viktigt att endast bestämma närvaron eller frånvaron av ett magnetfält, Hall-sensorer med diskret utgång. Dessa IC:er integrerar vanligtvis en eller flera hystereskomparatorer som jämför differentialförstärkarens utspänning med tröskelnivåer. Tillämpningsområdet för diskreta Hall-sensorer är ett brett utbud av automatiserade applikationer: dörröppningssensorer, frekvensmätare, synkronisatorer, biltändningssystem, styrenheter för rörliga element (ventiler, grindar, lock, etc.), säkerhetssystem, styrenheter för elmotorer och många andra.
Ett klassiskt exempel på användningen av diskreta Hall-sensorer är elmotorer som används i datorutrustning(Figur 3). En Hall-sensor placerad på motorkortet mäter styrkan på magnetfältet som skapas av rotorns permanentmagnet och genererar en pulssignal med logiska nivåer, vars frekvens är proportionell mot rotationshastigheten, vilket gör att du kan utvärdera både fläktens hälsa och prestanda.

Relativt nytt område Tillämpningar av diskreta Hall-sensorer är fjärrövervakningsanordningar, där de gradvis ersätter slutna elektromekaniska kontakter (reed-omkopplare) som traditionellt används i dessa applikationer. Till exempel att använda en Hall-sensor i kombination med en treaxlig accelerometer i en trådlös dörrsensor DMS-100, producerad av företaget Pandora(Figur 4), låter dig känna igen stötar, rotation och tillståndet (öppet/stängt) för dörrar, luckor, bagageluckor, trunks, släpvagnar. Eftersom DMS-100-sensorn använder trådlöst gränssnitt dataöverföring och drivs av ett batteri kan den enkelt och snabbt placeras på svåråtkomliga platser.

De främsta fördelarna med Hall-sensorer jämfört med reed-brytare är hög tillförlitlighet, kompakthet och ökad känslighet. Dessutom kan mätelementet bestämma inte bara magnituden utan också magnetfältets polaritet, inklusive användning av flera koordinater. Alla dessa fördelar gör att Hall-sensorer kan placeras som en lovande elementbas.
I de fall där kontinuerlig övervakning av objektet inte krävs (till exempel för säkerhetssystem) kan Hall-sensorns strömförbrukning minskas genom att växla till intermittent drift. Till exempel, när du övervakar en dörr eller ett fönster, finns det inget behov av att ständigt bestämma deras tillstånd, det räcker att göra detta flera gånger i sekunden, eftersom hastigheten på deras rörelse är relativt låg. På grund av det faktum att Hall-sensorns mätelement är praktiskt taget tröghetsfritt, och den moderna elementbasen kännetecknas av hög hastighet, räcker bara några tiotals mikrosekunder för att mäta magnetfältsnivån utan att ge avkall på noggrannheten. Således, om sensorchippet tillbringar större delen av tiden i viloläge, i vilket strömförbrukningen reduceras till nivån på flera mikroampere, kan medelvärdet av strömmen som förbrukas av sensorn minskas med flera storleksordningar.
Låt till exempel 100 μs och en ström på 5 mA räcka för att utföra mätningar. Om mätningar görs 10 gånger per sekund med ett intervall på 100 ms, då med en strömförbrukning i viloläge på 5 μA, kommer den genomsnittliga strömförbrukningen I avg att beräknas enligt formel 1 (Figur 5):
$$I_(avg)=\frac(T_(1))(T)\ gånger I_(1)+\frac(T_(2))(T)\ gånger I_(2),\qquad(\mathrm(( ))(1)(\mathrm()))$$
Var T 1 = (t 1 – 0) – mätskedets varaktighet, T 2 = (T – t 1) – vilolägets varaktighet, det vill säga (0,1/100)∙5000 + (99,9/100)∙5 ≈ 10 µA.

Detta är 500 gånger mindre än strömmen på 5 mA som chippet skulle förbruka vid kontinuerliga mätningar. Därför är användningen av intermittent läge ett effektivt sätt att minska strömförbrukningen för diskreta Hall-sensorer utan att kompromissa med deras funktionalitet, vilket gör dem idealiska för ett brett utbud av kompakta batteridrivna applikationer.
Lågeffekt Hall-sensorer från Texas Instruments
I skrivande stund innehåller TI:s produktsortiment två modeller av sensorer med ultralåg förbrukning som kompletterar varandra i funktionalitet. Den viktigaste skillnaden mellan de föreslagna enheterna är metoden för att generera utsignalen. DRV5032-mikrokretsarna detekterar närvaron av ett magnetiskt fält med en induktion över tröskelvärdet, vilket, beroende på modifieringen, kan vara i intervallet 3,8...63 mT (Figur 6), medan DRV5012-sensorerna har en låsfunktion , vars tillstånd ändras endast när magnetfältets polaritet (Figur 7). Detta bestämmer det praktiska syftet med mikrokretsarna: DRV5032 är först och främst designade för att bestämma närvaron av föremål, till exempel för att upptäcka öppningen av ett fönster eller en dörr, och kan fungera med konventionella tvåpoliga magneter, och DRV5012 - att mäta rörelse, till exempel rotorn på en elmotor, och är mer fokuserade på att arbeta med flerpoliga magneter.


Förenklat strukturplan DRV5032-sensorer visas i figur 8, och deras tekniska egenskaper anges i tabell 1. Mikrokretsen integrerar: en spänningsstabilisator som säkerställer det erforderliga driftläget för alla noder över ett brett utbud av matningsspänningar, en kontrollerad strömkälla för mätelementet , en differentiell operationsförstärkare med kompensationskretsar som eliminerar påverkan av temperatur och förspänning som finns vid utgången av mätelementet, och styrutgångar logiska grindar. Från externa komponenter För stabil drift av enheten krävs endast en blockerande keramisk kondensator med en kapacitet på minst 0,1 μF, vilket eliminerar transienta processer i strömkretsen orsakade av den pulserade naturen hos den förbrukade strömmen.

Bord 1. Specifikationer DRV5032 chips
| alternativ | namn | ||||||
|---|---|---|---|---|---|---|---|
| DRV5032DU | DRV5032FA | DRV5032FB | DRV5032FC | DRV5032FD | DRV5032AJ | DRV5032ZE | |
| Känslighet, mT | 3,9 | 4,8 | 4,8 | 4,8 | 4,8 | 9,5 | 63 |
| Typ av känslighet för magnetfält | Unipolär | Bipolär | Bipolär | Bipolär | Unipolär | Bipolär | Bipolär |
| Typ av utgångar | Tryck dra | Tryck dra | Tryck dra | Öppna avlopp | Tryck dra | Öppna avlopp | Öppna avlopp |
| Antal utgångar | 1, 2 * | 1 | 1 | 1 | 2 * | 1 | 1 |
| Samplingsfrekvens, typisk, Hz | 20 | 20 | 5 | 20 | 20 | 20 | 20 |
| Matningsspänning, V | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65…5,5 | 1,65..5,5 | 1,65…5,5 |
| 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Genomsnittlig strömförbrukning, typ. ** , µA | 1,3…2,3 | 1,3…2,3 | 0,54…1,06 | 1,3…2,3 | 1,3…2,3 | 1,3…2,3 | 1,3…2,3 |
| 55 | 55 | 55 | 55 | 55 | 55 | 55 | |
| 40 | 40 | 40 | 40 | 40 | 40 | 40 | |
| Driftstemperatur, °C | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 | -40…85 |
| Ram | SOT-23, X2SON | SOT-23, X2SON | SOT-23 | SOT-23 | X2SON | SOT-23, X2SON | SOT-23 |
| * Beroende på typ av hölje: SOT-23 – en utgång (utlöses när magneten är orienterad med sydpolen mot sensorn); X2SON – två utgångar (för nord- och sydpoler). ** Med en matningsspänning på 1,8…5,0 V. |
|||||||
Beroende på version kan DRV5032-chips vara känsliga för polariteten hos det externa magnetfältet. För bipolära versioner går utspänningen till en logisk låg nivå när magnetfältsinduktionen ökar över tröskelvärdet, oavsett polaritet (Figur 6). Detta förenklar produktionen av utrustningen, eftersom i detta fall operationen med att placera magnetpolerna elimineras. Unipolära versioner (med suffixen DU och FD) kan ha två utgångar: OUT1-utgången är inställd på logisk nolla när magneten är orienterad med nordpolen mot enheten, och OUT2 – med sydpolen (Figur 9). Förmågan att bestämma polariteten hos ett magnetfält utökar funktionaliteten hos slutapplikationer, vilket gör att du kan bestämma inte bara närvaron av ett objekt utan också dess orientering. I mikrokretsar med DU-suffixet, producerade i ett trestifts SOT-23-paket, finns det ingen OUT1-utgång, och de kan bara bestämma närvaron av en magnet orienterad mot sensorn med sydpolen.

Typen av utgångar beror också på enhetens version. Familjen innehåller både mikrokretsar med push-pull-utgång, vilket gör det möjligt att ansluta sensorutgångar direkt till mikrokontrollerns portar utan att använda externa pull-up-motstånd, och enheter med en "open drain"-utgång, som låter dig kombinera utgångar från flera sensorer med hjälp av en kabeldragning ELLER-krets. Dessutom tillåter ett brett matningsspänningsområde på 1,65...5,5 V användning av DRV5032-mikrokretsar med de mest populära serierna av mikrokontroller utan att använda ytterligare system koordinering av logiska signalnivåer.
För att mäta styrkan på det externa magnetfältet kräver DRV5032-mikrokretsar i genomsnitt 40 μs. Dessutom utför alla versioner, utom enheter med FB-suffixet, 20 mätningar per sekund. Detta tillåter, med en maximal strömförbrukning på 2 mA, att reducera dess medelvärde till nivån 1,3...2,4 μA. Ännu större effektivitet tillhandahålls av mikrokretsar med suffixet FB, där mätfrekvensen reduceras till 5 Hz, vilket gör att den genomsnittliga strömförbrukningen kan bringas till nivån 0,54...1,6 μA.
Blockschemat för DRV5012-mikrokretsarna (Figur 10) och deras tekniska egenskaper (Tabell 2) liknar på många sätt DRV5032. Förutom metoden för att generera utsignalen som diskuterats ovan, en annan särdrag DRV5012 kan styra mätfrekvensen med hjälp av SEL-stiftet. Om det är en låg nivå vid denna ingång kommer mikrokretsen att mäta magnetfältsstyrkan 20 gånger per sekund, och när en logisk enhet ställs in ökar mätfrekvensen till 2,5 kHz. Detta möjliggör användning av dessa enheter i applikationer med både långsamma och snabba processer, samt optimerar systemets energiförbrukning i olika lägen arbete.

Tabell 2. Tekniska egenskaper för DRV5012-chippet
| alternativ | ||
|---|---|---|
| Känslighet, mT | 2 | |
| Utgångstyp | Tryck dra | |
| Matningsspänning, V | 1,65…5,5 | |
| Maximal ström in aktivt läge, typ., mA | 2 | |
| Aktivt läges varaktighet, typ., µs | 55 | |
| Mätlängd, typisk, µs | 40 | |
| Driftstemperatur, °C | -40…85 | |
| Ram | X2SON | |
| Samplingsfrekvens, typisk, Hz | 20 | 2500 |
| Genomsnittlig strömförbrukning vid matningsspänning 1,8…5,0 V, typisk, µA | 1,3…2,0 | 142…160 |
Lågeffekt Hall-sensorer från Honeywell
I sortimentet finns en av äldsta tillverkarna Hallsensorer – företag Honeywell– Det finns också två modeller av lågeffektlägessensorer, som endast skiljer sig i känslighet.
Blockschemat (Figur 11), tekniska egenskaper (Tabell 3) och funktionsprincipen för SM351 och SM353 mikrokretsar liknar på många sätt DRV5032 mikrokretsar tillverkade av Texas Instruments som diskuterats ovan. För att minska strömförbrukningen tillförs ström till analoga noder endast under mätningar som varar 15 µs. Effektomkoppling utförs med hjälp av en transistoromkopplare som styrs av en timer som innehåller en klockgenerator, räknare, dekoder och andra nödvändiga komponenter. Den genomsnittliga frekvensen för mätningar av magnetfältstyrka är 10 Hz. Med en matningsspänning på 1,8 V gör detta driftsätt med ett typiskt strömvärde i mätläget på cirka 1 mA det möjligt att minska mikrokretsens medelström till en nivå som inte överstiger 0,4 μA.

Mikrokretsarna SM351 och SM353 är okänsliga för polariteten hos det externa magnetfältet och har push-pull-utgångar som gör att de kan anslutas till en mikrokontroller utan användning av externa pull-up-motstånd. Båda enheterna tillverkas i kompakta SOT-23-paket och kan arbeta i ett brett utbud av matningsspänningar (1,65...5,5 V) och temperaturer (-40...85°C), vilket gör att de kan användas i bil- och industriell elektronik tillsammans med de mest populära mikrokontrollerna.
Tabell 3. Tekniska egenskaper hos Honeywell Hall-sensorer vid en matningsspänning på 1,8 V
| alternativ | namn | |
|---|---|---|
| SM351 | SM353 | |
| Utgångstyp | Tryck dra | |
| Matningsspänning, V | 1,65…5,5 | |
| Aktivt läges varaktighet, typ., µs | 15 | |
| Driftstemperatur, °C | -40…85 | |
| Ram | SOT-23 | |
| Samplingsfrekvens, typisk, Hz | 10 | |
| Känslighet, mT | 0,7 | 1,4 |
| Maximal ström i aktivt läge, typisk, mA | 1 | 0,8 |
| Genomsnittlig strömförbrukning, µA | 0,36 | 0,31 |
Till skillnad från produkter från Texas Instruments kräver Honeywell-sensorer en annan magnetfältsorientering. För korrekt funktion måste externa magneter vara orienterade med sina poler mot ändytan av mikrokretsarna (Figur 12), medan för Texas Instruments sensorer faller detta arrangemang av magneter in i den "blinda" zonen.

Studie av egenskaper hos Hall-sensorer
För att kontrollera den faktiska prestandan hos Hall-sensorer med låg effekt jämförde vi SM351LT och SM353LT IC:er Honeywell och DRV5032FA och DRV5032FB från Texas Instruments. Dessa enheter har samma funktionellt syfte, hölje och typ av utgångar och skiljer sig endast i känslighet, svarshastighet och strömförbrukning. Vid utarbetandet av artikeln genomfördes en studie på fem prover av mikrokretsar av varje modell.
Diagrammet och utseendet på mätinställningen visas i figur 13. Varje sensor är monterad på en separat bakbord, som innehåller en keramisk kondensator C2, utformad för att eliminera transienter i strömkretsen, och ett motstånd R3, som låter dig övervaka formen på den förbrukade strömmen med hjälp av ett oscilloskop. Vid utförande av mätningar som inte är relaterade till övervakning av tidsdiagram stängs motstånd R3 av en extern bygel.

PV1-multimetern är designad för att mäta medelströmvärdet i mikrokretsarnas strömkretsar. Den mäter spänningsfallet över motståndet R1, vars resistans är vald så att vid en ström på 1 mA är potentialskillnaden över den lika med 200 mV. Detta gör det möjligt att vid multimeterns känsligaste gräns på 200 mV mäta ström i området 0...1 mA med en upplösning på 0,005 μA, vilket är tillräckligt för forskning.
Elektrolytisk kondensator C1 är utformad för att eliminera eventuellt spänningsfall under mätningar på grund av en ökning av strömförsörjningens inre resistans efter tillsats av motstånd R1. Element R1 och C1 bildar ett filter låga frekvenser med en tidskonstant på 0,2 s, vilket är mycket längre än mättiden (15 μs för SM351LT och SM353LT, 40 μs för DRV5032FA och DRV5032FB).
Funktionen av sensorn styrs med hjälp av LED VD1, vars ström begränsas av motstånd R2. För att eliminera påverkan av mikrokretsens belastning på mängden ström den förbrukar, är lysdioden ansluten till den positiva polen på strömkällan med en separat tråd, som går förbi R1C1-filtret.
Kretsen drivs från en reglerad DC-källa med styrning av utspänningen. Eftersom matningsspänningen mäts före filtret R1C1, kommer dess faktiska värde vid mikrokretsarnas stift att vara mindre med mängden spänningsfallet över motståndet R1, som kan nå 60 mV vid en matningsspänning på 5 V. studier som utförs är uppskattningar, detta kan försummas, eftersom anslutning av en multimeter, som har, även om det är högt, men fortfarande ändligt internt motstånd, direkt till mikrokretsarnas strömterminaler skulle leda till uppkomsten av ett ytterligare fel i strömmätningarna.
Resultaten av strömförbrukningsmätningar ges i tabell 4. Som framgår av erhållna data har alla studerade sensorer god repeterbarhet av parametrar, och de erhållna värdena motsvarar de typiska värdena som specificeras i teknisk dokumentation.
Genom att analysera beroendet av medelvärdena för strömförbrukning på matningsspänningen (Figur 14), kan du se att energiförbrukningen för enheter tillverkade av Texas Instruments beror mindre på denna parameter än Honeywell-sensorer. Samtidigt, vid matningsspänningar mindre än 4 V, är Honeywells mikrokretsar mer ekonomiska än Texas Instruments produkter.

Graferna som visas i figur 14 visar också tydligt effekten av mätfrekvens på energiförbrukningen. Strömmen som förbrukas av DRV5032FA-mikrokretsen med en frekvens på 20 Hz är nästan dubbelt så stor som strömmen för DRV5032FB-mikrokretsen med en frekvens på 5 Hz över hela matningsspänningsområdet. Det kan antas att DRV5032FB har lägsta möjliga strömförbrukning för denna teknik, och att ytterligare sänka mätfrekvensen ner till noll kommer inte längre att ha någon betydande inverkan på mängden ström som förbrukas.
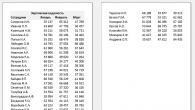
Tabell 4. Resultat av mätningar av strömförbrukning vid en temperatur på 27°C
| namn | Prov | Matningsspänning, V | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1,8 | 2,0 | 2,5 | 3,0 | 3,3 | 3,6 | 4,0 | 4,5 | 5,0 | 5,5 | ||
| SM351LT | 1 | 0,43 | 0,54 | 0,75 | 1,06 | 1,26 | 1,42 | 1,74 | 2,20 | 2,76 | 3,08 |
| 2 | 0,44 | 0,51 | 0,73 | 1,00 | 1,20 | 1,40 | 1,75 | 2,15 | 2,60 | 3,00 | |
| 3 | 0,46 | 0,54 | 0,76 | 1,04 | 1,26 | 1,43 | 1,76 | 2,19 | 2,63 | 3,19 | |
| 4 | 0,45 | 0,50 | 0,74 | 1,05 | 1,25 | 1,52 | 1,81 | 2,18 | 2,68 | 3,15 | |
| 5 | 0,45 | 0,52 | 0,72 | 1,03 | 1,25 | 1,45 | 1,73 | 2,17 | 2,76 | 3,14 | |
| Genomsnittligt värde | 0,45 | 0,52 | 0,74 | 1,04 | 1,24 | 1,44 | 1,76 | 2,18 | 2,69 | 3,11 | |
| SM353LT | 1 | 0,39 | 0,45 | 0,65 | 0,92 | 1,09 | 1,28 | 1,60 | 1,99 | 2,47 | 2,81 |
| 2 | 0,39 | 0,43 | 0,65 | 0,90 | 1,08 | 1,27 | 1,53 | 2,00 | 2,38 | 2,84 | |
| 3 | 0,37 | 0,47 | 0,68 | 0,92 | 1,07 | 1,27 | 1,61 | 1,95 | 2,50 | 2,90 | |
| 4 | 0,44 | 0,48 | 0,69 | 0,92 | 1,09 | 1,29 | 1,62 | 1,93 | 2,50 | 2,91 | |
| 5 | 0,40 | 0,47 | 0,67 | 0,93 | 1,12 | 1,32 | 1,60 | 2,01 | 2,41 | 2,93 | |
| Genomsnittligt värde | 0,40 | 0,46 | 0,67 | 0,92 | 1,09 | 1,27 | 1,59 | 1,98 | 2,45 | 2,88 | |
| DRV5032FA | 1 | 1,10 | 1,18 | 1,41 | 1,51 | 1,58 | 1,64 | 1,72 | 1,80 | 1,95 | 2,10 |
| 2 | 1,14 | 1,20 | 1,45 | 1,53 | 1,60 | 1,67 | 1,73 | 1,83 | 1,95 | 2,03 | |
| 3 | 1,12 | 1,21 | 1,51 | 1,59 | 1,65 | 1,70 | 1,79 | 1,85 | 2,00 | 2,20 | |
| 4 | 1,11 | 1,23 | 1,46 | 1,54 | 1,59 | 1,64 | 1,73 | 1,80 | 1,90 | 2,06 | |
| 5 | 1,07 | 1,14 | 1,39 | 1,48 | 1,52 | 1,60 | 1,67 | 1,75 | 1,86 | 2,05 | |
| Genomsnittligt värde | 1,11 | 1,19 | 1,44 | 1,53 | 1,59 | 1,65 | 1,73 | 1,81 | 1,93 | 2,09 | |
| DRV5032FB | 1 | 0,49 | 0,50 | 0,61 | 0,66 | 0,71 | 0,75 | 0,79 | 0,88 | 1,01 | 1,13 |
| 2 | 0,49 | 0,50 | 0,59 | 0,64 | 0,70 | 0,75 | 0,78 | 0,88 | 1,00 | 1,15 | |
| 3 | 0,50 | 0,53 | 0,62 | 0,66 | 0,71 | 0,76 | 0,83 | 0,90 | 1,02 | 1,16 | |
| 4 | 0,48 | 0,51 | 0,60 | 0,63 | 0,70 | 0,75 | 0,80 | 0,86 | 1,00 | 1,15 | |
| 5 | 0,49 | 0,52 | 0,61 | 0,65 | 0,70 | 0,75 | 0,81 | 0,91 | 1,03 | 1,17 | |
| Genomsnittligt värde | 0,49 | 0,51 | 0,61 | 0,65 | 0,70 | 0,75 | 0,80 | 0,89 | 1,00 | 1,15 | |
Formen på strömmen som förbrukas av mikrokretsarna kan ses genom att ta bort bygeln och ansluta ett oscilloskop till motståndet R3. Mätresultaten (Figur 15) bekräftar att den har en uttalad pulskaraktär och skiljer sig åt med flera storleksordningar i det aktiva och viloläget.

Annan viktig egenskap Hallsensorer är känsligheten som bestämmer funktionerna praktisk applikation, samt krav på egenskaper och placering av magnetfältkällor. Den tekniska dokumentationen för mikrokretsar anger mängden induktion vid den punkt som motsvarar platsen för enhetens kropp. Den magnetiska fältstyrkan påverkas dock avsevärt av avståndet, därför kommer sensorn, när du använder riktiga magneter, att arbeta på ett visst avstånd, beroende på deras geometriska dimensioner och kvarvarande induktion.
Du kan använda TI-dokumentation eller informationsmaterial, tillägnad Hall-sensorer. För permanenta rektangulära magneter kan induktionen på avstånd D från magnetpolernas ytor bestämmas med formel 2:
$$\vec(B)=\frac(B_(r))(\pi)\times \left(\arg \tan \left(\frac(WL)(2D\times\sqrt(4D^(2)+ W^(2)+L^(2)))\höger)-\arg \tan \left(\frac(WL)(2(D+T)\times\sqrt(4(D+T)^(2) )+W^(2)+L^(2)))\höger)\höger).\qquad(\mathrm(())(2)(\mathrm()))$$
Och för cylindriska sådana - enligt formel 3:
$$\vec(B)=\frac(B_(r))(2)\times \left(\frac(D+T)(\sqrt((0.5C)^(2)+(D+T)^ (2)))-\frac(D)(\sqrt((0,5C)^(2)+D^(2)))\höger),\qquad(\mathrm(())(3)(\mathrm ()))$$
där W är bredd, L är längd, T är tjocklek, C är diameter, Br är magnetinduktion (Figur 16).

Du kan också använda en online-kalkylator för detta ändamål, tillgänglig på Texas Instruments webbplats. Fördelen med det senare alternativet är möjligheten att snabbt bestämma avståndet vid vilket en viss enhet kommer att fungera. Till exempel, genom att ange parametrarna för en permanent magnet på sidan dedikerad till DRV5032-sensorerna, kan du omedelbart bestämma både mängden induktion vid önskad punkt och avstånden vid vilka alla versioner av mikrokretsarna i denna modell kommer att fungera (Figur 17).

Det var denna kalkylator som användes för att bestämma induktionen som skapades av den cylindriska permanentmagneten gjord av N38-material 8 x 8 mm som användes i mätningarna (Figur 17).
Resultaten av mätning av sensorernas känslighet ges i tabell 5. Enligt erhållna data, vid användning av ovanstående magnet, triggades Texas Instruments sensorer på ett medelavstånd av 24 mm, vilket motsvarar en induktion på 3,6 mT, och återställde det ursprungliga tillståndet på ett medelavstånd av 33...34 mm (med induktion 1,45...1,48 mT). Under forskningen rörde sig magneten längs en axel vinkelrät mot det övre planet av mikrokretsen och passerade genom dess centrum (Figur 9). Enligt den tekniska dokumentationen ska motsvarande egenskaper hos dessa enheter ligga inom intervallet 1,5...4,8 mT (drift) och 0,5...3,0 mT (återvinning) över hela spänningsområdet. Således uppfyller alla prover av DRV5032FA- och DRV5032FB-mikrokretsar helt de deklarerade egenskaperna.
I studier av Honeywell-sensorer flyttades magneten enligt tillverkarens rekommendationer (Figur 12). SM351LT-sensorerna utlöstes vid ett medelavstånd mellan magnet och chip på 36 mm, motsvarande en induktion på 1,25 mT, och återhämtade sig vid ett medelavstånd på 39 mm, motsvarande en induktion på 1,0 mT. Enligt den tekniska dokumentationen, för SM351LT-mikrokretsar, bör aktiveringsinduktionen vara i intervallet 3...11 G (0,3...1,1 mT), och frisättningsinduktionen bör vara minst 2 G (0,2 mT), och maximalt värde detta värde är inte standardiserat. Som framgår av forskningsresultaten visade sig den faktiska känsligheten hos SM351LT-sensorerna vara något lägre än de värden som anges i den tekniska dokumentationen, i motsats till SM353LT-mikrokretsarna, som utlöstes vid en genomsnittlig induktion på 1,86 mT (medelavstånd 31 mm), vilket är inom det tillåtna intervallet 6...20 G ( 0,6...2,0 mT).
Slutsats
Säkerhetssystem, energimätare, medicinsk utrustning, Internet of things-enheter - det här är inte en komplett lista över applikationer där Hall-sensorer som diskuteras i den här artikeln kan användas. De viktigaste egenskaperna hos all utrustning där dessa mikrokretsar kan användas är kompakthet och strikta krav på energiförbrukning, eftersom de utvecklades just för dessa ändamål.
Trots det faktum att de övervägda enheterna produceras av olika tillverkare, kompletterar deras egenskaper varandra, vilket ger en omfattande hårdvaruplattform på grundval av vilken utvecklare kan lösa många praktiska problem.