I denne veiledningen vil vi dekke både den vanlige og mikroversjonen, hvordan du setter opp og bruker MW-OSD-fastvaren, samt hvordan du kobler til Naze32 og mottakeren.
Hva er MinimOSD og Micro MinimOSD
Selv om oppsettet er mye mer komplisert enn andre OSD-er som Super Simple OSD eller E-OSD som jeg plugger inn og fungerer umiddelbart, har MinimOSD mange fordeler og skjermutseendet kan tilpasses fullt ut.
Mest nyttige funksjoner: visning av GPS-koordinater, tilpassbare stiler og fonter, ved hjelp av skjermmenyen kan du endre koeffisientene til PID-kontrollere, priser, etc. Et eksempel på hva som kan vises på skjermen.
Stille inn PID-koeffisienter gjennom menyen:

Dimensjoner, vekt, pinout, lodding for å redusere dimensjoner
Full størrelse MinimOSD
Denne OSD-en har eksistert i mange år. Fordelen med denne versjonen (MinimOSD med KV Mod) er at den har pinner på siden for tilkobling av strømsensor, RSSI, spenningssensor, etc. Tidligere måtte vi veldig nøye lodde ledningene direkte til bena på brikken selv, og dette var veldig vanskelig. Denne versjonen har gjort livet mye enklere. Jeg kjøpte meg et slikt brett (versjon 2)

MinimOSD-dimensjoner med KV Mod V2: bredde 21 mm, lengde: 43 mm, vekt: 5,5 g (inkludert kontakter).
Micro MinimOSD
Jeg er overrasket over mikrostørrelsen til denne OSD-en, men den har alle funksjonene til fullstørrelsesversjonen. I tillegg til muligheten for strømforsyning fra 12V, som nesten aldri ble brukt i den gamle versjonen, på grunn av overoppheting av brettet. Så det var veldig rimelig å kaste ut denne funksjonaliteten og redusere størrelsen.

Mikroversjonen er omtrent 1/3 full i vekt og størrelse.
Loddekoblinger
Å lodde kontaktene til MinimOSD i full størrelse var enkelt og greit, men for mikroversjonen liker jeg ikke måten folk vanligvis lodder dem på.

Mitt kreative er å bruke vinklede koblinger i stedet for rette, slik at jeg har ekstra plass når jeg monterer inne i quad-en.
Helt til slutt pakker vi inn varmekrympe for å beskytte lodding og ledninger.
Koble til Naze32, batteri, mottaker, kamera, videosender
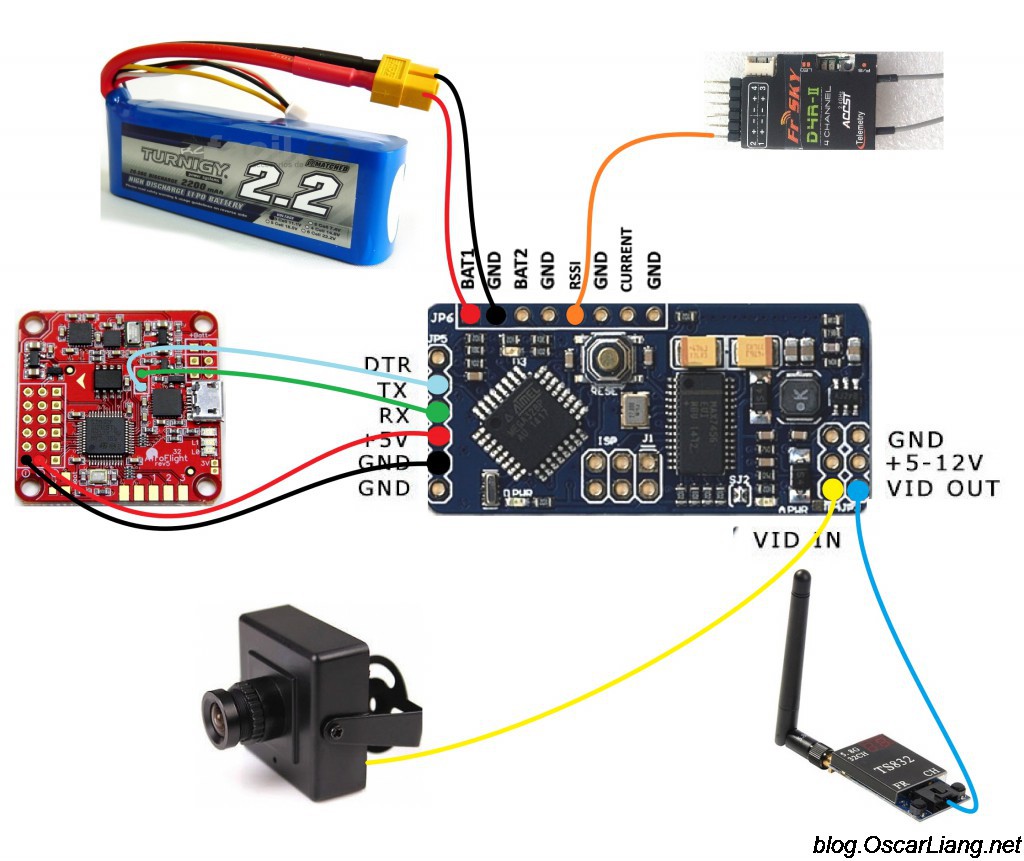
Monteringen av copteret mitt er veldig enkelt. Her i diagrammet er alt som skal kobles til: Naze32, LiPo, mottaker, FPV-kamera og videosender.

Tilkoblingsskjema over en vanlig MinimOSD med Naze32, kamera, mottaker, videosender, batteri.
Slik kobler du til mikroversjonen:

Ofte stilte spørsmål 1. Noen klager over at teksten forsvinner når gassen økes. Løsning: koble all elektronikk - kamera, OSD, videosender til en felles jording.
FAQ 2. OSD vises ikke, kun bildet fra kameraet. Løsning: prøv å endre PAL/NTSC-standarden i OSD-innstillingene.
VBAT1-pinnen er koblet til hovedlitiumbatteriet for å vise spenning. RSSI-pinnen er koblet til kontrollmottakeren for å vise signalnivået (hvis mottakeren er FrSky D4R-II, i CPPM-modus, er Pin1 PPM-signalet, PIN2 er RSSI-utgangen).
Kobling til Naze32 via den serielle porten (TX og RX) vil tillate Naze32 å sende flydata til skjermen (GPS, kompasskurs, etc.), og OSD vil kunne endre PID-koeffisientene til flykontrolleren ved å bruke fjernkontroll.
Vær forsiktig! Tilkoblingen til datamaskinen bruker samme serielle port, noe som betyr at hvis du vil bruke Baseflight eller Cleanflight konfigurator, må du først deaktivere TX og RX fra OSD.
Uten en seriell porttilkobling vil MinimOSD vise RSSI og spenning på egen hånd.
Hvis du bruker Taranis i PPM-modus, vennligst les denne artikkelen: hvordan får du RSSI på en egen kanal (uten ekstra ledninger).
Slik ser det ut inni min quad.
Konfigurerer med MW-OSD GUI
Det er ganske mange firmwares for MinimOSD, min favoritt er Multiwii-OSD (mwosd). Den nåværende versjonen er 1.3., konfiguratoren er et veldig nyttig program. Skjermmenyen er tydelig, fastvaren er oppdatert, det er støtte for Cleanflight og Baseflight. Den lar deg også justere PID-forsterkningene direkte fra OSD.
Koble MinimOSD til FTDI-programmerer
Både oppsett og fastvare krever en FTDI-adapter. Tilkoblingen går gjennom 5 ledninger: DTR (GRN), TX, RX, 5V og GND.


Sette opp MinimOSD ved å bruke MW-OSD GUI
Gjennom det grafiske grensesnittet kan du konfigurere visningen av flydata. Fordi Jeg flyr en mini quad, alt jeg trenger er batterispenning, RSSI og en timer. Jeg bruker 4S litiumbatterier og advarselen for lavt batteri er satt til 13,6V (3,4V per celle, selv om jeg burde sette terskelen høyere). For 3S-konfigurasjonen kan spenningen som advarselen vises ved, settes til 11V. Jeg bruker FPV i PAL-format

Det eneste å bekymre seg for er batterispenningen. Standardverdien er langt fra ideell, så du må leke med innstillingene for å få riktig verdi. Hvordan gjør jeg det:
Standardverdien for " spenningsjustering" = 200, og spenningen vist av OSD var 21,0V. Jeg tok et multimeter, målte spenningen på batteriet, og fikk 11,1V

La oss nå redusere verdien spenningsjustering«opptil 110, nå har jeg 11,5V på OSD-skjermen. For å unngå konstante frem og tilbake endringer i parameteren, må vi beregne den nøyaktige verdien ved hjelp av matematikk og informasjonen som vi allerede har 🙂 Vi må beregne hvor mange volt 1 verdi av "spenningsjustering" parameteren gir.
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Vi vet at riktig verdi på skjermen skal være 11,1V, så verdien " spenningsjustering"bør være:
110 - (11,5-11,1) / 0,1056 = 106,21 (106 er greit)
Betydning" spenningsjustering» kan endres ikke bare i konfiguratoren, men også gjennom skjermmenyen, så det er ikke nødvendig å koble MinimOSD til datamaskinen og bruke konfiguratoren.
Arduino som programmerer for MinimOSD?
Jeg prøvde å bruke min Arduino UNO som en FTDI-programmerer, som jeg har gjort for andre enheter før. Jeg klarte å endre OSD-parametrene gjennom MW-OSD GUI-programmet. Jeg fikk imidlertid et problem da jeg blinket MinimOSD, feilmeldingen var:
avrdude: stk500_getsync(): ikke synkronisert: resp=0x00.
Det ser ut som et slags datasynkroniseringsproblem, men jeg sørget for at jeg koblet DTR til RESET på Arduino-kortet riktig, jeg vet ikke hva annet jeg skal gjøre, så jeg brukte FTDI-programmereren min til å flashe MinimOSD.
OSD-meny: Sett opp PID-er, Rate, Voltage, RSSI
OSD-menyen er min favorittfunksjon, og det er i grunnen derfor jeg har gitt opp SuperSimple OSD. Det er mange innstillinger som du kan endre uten å koble til en datamaskin. For eksempel kan jeg endre verdiene til PID-koeffisientene direkte i feltet ved hjelp av fjernkontrollen min, uten bluetooth og en datamaskin! Du kan imidlertid ikke endre roll rate og pitch rate parametere separat i Cleanflight (engelsk), i øyeblikket de er koblet (du kan bare endre begge samtidig, ca. Transl.) I den nye versjonen vil disse parameterne være uavhengige.
For å komme til MW-OSD-menyen må du først deaktivere copteret, deretter:
- gass i midten
- yaw (yaw) - rett
- pitch (pitch) - fremover.
For å navigere gjennom menyen:
- Roll / pitch (pitch / roll) - for å gå gjennom menyen
- Yaw (yaw) - for å endre verdier
- PID-konfigurasjon (Roll/Pitch/Yaw PID for forskjellige flymoduser)
- RC Tuning (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (Throttle PID Att)
- Spenning (vis eller ikke spenning, "Juster spenning", "Spenningsalarm", "Celler"-verdier)
- RSSI (vis eller ikke)
- Strøm (vis forbrukt strøm eller ikke, dens innstilling)
- Avansert (Enheter: meter/tommer, signal: Pal eller NTSC, kompass)
- Display (brytere, gass, GPS-koordinater, sensorer, gimbal, etc.)
- Statistikk (avstand, maks. høyde, maks hastighet, flytid)
Blinker
Noen MinimOSD-leverandører flasher den nyeste versjonen selv, så du trenger ikke å bekymre deg for å blinke. Men kanskje vil du senere oppdatere fastvaren eller prøve en annen, for å sjekke fastvareversjonen, slå på OSD på quad-en og se på inskripsjonen på oppstartsskjermen.
Hver fastvare i instruksjonene beskriver i detalj hvordan du flasher. Dette er sammendraget:
- Last ned firmware-filer.
- Last ned Arduino IDE
- Åpne fastvarefiler i Arduino IDE
- Endre innstillinger om nødvendig
- Jeg endret ikke mye, bare bretttypen (WitespyV1.1) og flykontrollerens fastvare (Cleanflight)
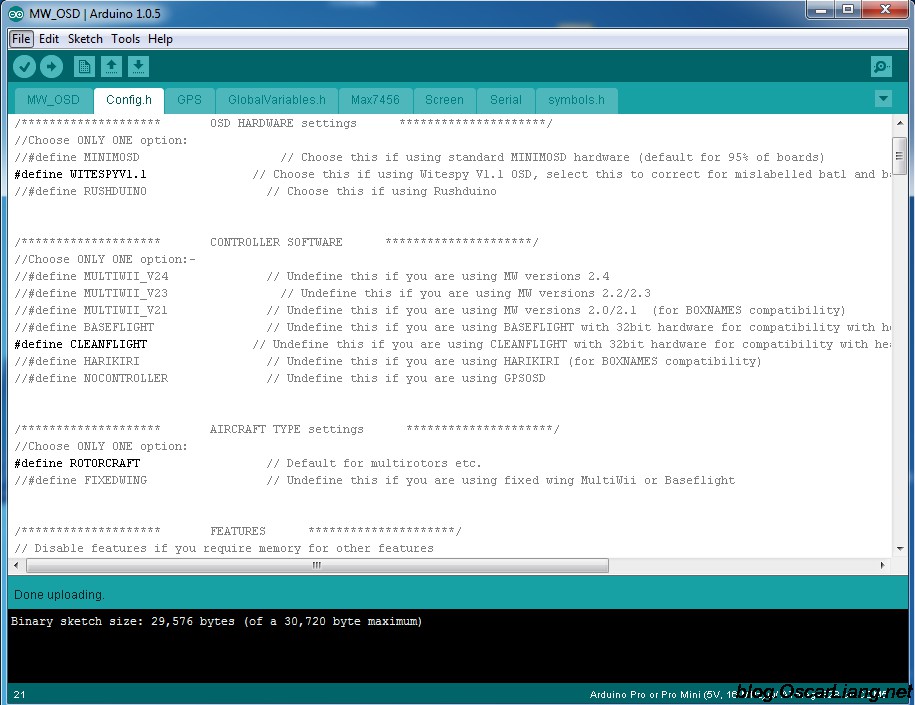
- Koble FTDI-adapter (programmerer) til MinimOSD / Micro MinimOSD
- Klikk Kompiler og last opp
OSD-en er et nyttig tilbehør for kameraflyging. I denne artikkelen skal vi ta en titt på hva en OSD er, hvordan den kobles til vårt FPV-utstyr, og til slutt en oversikt over funksjonene til forskjellige OSD-er.
Hvis du har spørsmål - gi meg beskjed i kommentarfeltet.
Hva er OSD og hva er fordelene
OSD står for On Screen Display - dvs. vises på skjermen eller menyen på skjermen (dvs. på toppen av hovedbildet, vanligvis fra kameraet, vises noe tilleggsinformasjon, for det meste tekst). I vår hobby er en OSD et lite kretskort som viser flydata på toppen av kamerabildet ditt. Dette lar deg overvåke tilstanden til quadrocopteren direkte under flyturen på kameraet.
Hvis du har de riktige sensorene og en OSD, vil du kunne se flydata rett på brillene eller skjermen, som batterispenning, hvor mye strøm motorene dine og annen elektronikk trekker, høyden din, GPS-koordinater osv.
Dette gjør det tryggere å fly rundt kameraet, fordi du kan se batterinivået, vite når du skal lande, hvor langt du allerede har flydd og i hvilken retning du må tilbake.
OSD er ikke nødvendig for kameraflyging, men som du kan se er det ekstremt nyttig. De fleste kjøper i det minste en SimpleOSD for å se spenningen på batteriet, dette er nødvendig for å unngå overutlading (hvis du flyr langt, er ikke sirenen som signaliserer lavt batteri hørbar).
Datatyper som kan vises ved hjelp av OSD
Bildet viser det mest brukte datasettet når du flyr rundt kameraet.

Timer
Avhengig av typen OSD kan dette være flytid (starter fra øyeblikket du tar av) eller driftstid (starter fra øyeblikket quadcopteren slås på). Noen OSD-er lar deg vise flere typer tidtakere.
Batterispenning
Nesten alle OSD-er lar deg vise spenning. Dette er den viktigste informasjonen når du flyr rundt kameraet, slik at du vet når du skal lande (jeg lander vanligvis når spenningen faller til 3,5V per celle)
Dagens forbruk
Hvis du har en strømsensor, kan du spore hvor mye strøm motorene trekker og hvor mye mAh av batteriet som allerede er brukt.
RSSI
RSSI er en indikasjon på signalstyrken til senderen din, vanligvis vist i prosent. Jo lenger du flyr, jo svakere vil signalet være, denne informasjonen vil hjelpe deg å vite på hvilket tidspunkt du bør snu.
RSSI er utgangen fra kontrollmottakeren din, vanligvis i PWM-format, så du kan trenge en D/A-omformer og et lavpassfilter.
Advarsler
Noen OSD-er kan vise forskjellige alarmer, advarsler, som du som bruker må sette terskelverdier for parametere som batterispenning, RSSI-verdi, etc.
Flymodus
Viser gjeldende flymodus for flyet ditt. Denne informasjonen vil være nyttig hvis du ofte bytter mellom ulike moduser som Loiter (svever på plass), manuell modus, selvnivelleringsmodus, slik at du ikke trenger å lure på hvilken modus flyet er i for øyeblikket. For å gjøre dette, må du koble flykontrolleren til OSD.
GPS
Ved hjelp av GPS får du ikke bare koordinatene til dronen, men også høyden (selv om det vil være mer nøyaktig enn å bruke et barometer eller ekkolodd). Takket være vanskelige beregninger kan vi se hastigheten over bakken, avstanden til startpunktet og dets koordinater (en grafisk visning av retningen mot startpunktet er en veldig nyttig ting, spesielt hvis du går deg litt vill).
Horisont
Den virtuelle horisonten vil hjelpe deg å forstå hvordan dronen vippes i verdensrommet.
OSD-tilkobling i kamera, videosender og flykontroller
Jeg vil dele alle OSD i 3 typer:
- Frittstående OSD-er
- OSD avhengig av flykontrolleren
- hybrid
Frittstående OSD-er kobles kun til kameraet og videosenderen, og kommuniserer ikke med flykontrolleren. Noen ganger kan de kobles direkte til GPS eller andre sensorer for å få tilgang til avlesningene deres. Et godt eksempel på denne typen er Skylark OSD (+GPS og strømsensor) og Super Simple OSD.
Kontrolleravhengige OSD-er er kun avhengige av data fra flykontrolleren, vanligvis via den serielle porten (RX/TX). OSD selv gjør ingenting annet enn å vise disse dataene. MinimOSD fra Hobbyking er et godt eksempel på denne typen OSD (hvis versjonen er umodifisert, som KV mod). Fordelen med denne typen er at OSD bruker data mottatt fra sensorene til kontrolleren, noe som betyr at kontrolleren selv bruker disse dataene for å forenkle administrasjon og kontroll. Mens i tilfelle av frittstående OSD-er, kan ikke data fra sensorer koblet til OSD-en brukes av flykontrolleren.
Hybridtypen OSD kan brukes som en frittstående OSD (med begrenset funksjonalitet), og kan også kobles til en kontroller for å øke settet med flydata som vises. MinimOSD med KV-mod er et flott eksempel på denne typen OSD: hvis den brukes som en frittstående, kan du bare se RSSI og spenning, men når du er koblet til en kontroller med GPS, vil du se gjeldende flymodus, GPS-koordinater, høyde , etc.
Enkleste tilkobling - Frittstående OSD
Som et eksempel, koble Hobbyking Super Simple OSD til FPV-kamera, videosender og 3S litiumbatteri.

Teoretisk sett kan du overvåke spenningen på det andre batteriet ved å bruke Bat2-porten.
Koble til hybride OSD-er
Jeg legger merke til at i dette tilfellet måler OSD uavhengig av batterispenningen og RSSI-nivået (selv om det er mulig å koble dem til kontrolleren og overføre data gjennom dens serielle port, fungerer begge alternativene fint).
Hvis du trenger å vise koordinatene, retningen til startpunktet og avstanden til det, må du koble GPS til Naze32.
OSD som jeg allerede har brukt
MinimOSD med KV Team Mod
MinimOSD er for øyeblikket min favoritt OSD og er den jeg bruker. Ved å laste ned riktig firmware kan MinimOSD brukes med Naze32, CC3D, Multiwii, APM og PixHawk-kort. Dette er et veldig bra brett som kan vise absolutt all flyinformasjon som er tilgjengelig fra sensorene.

MinimOSD kan vise all informasjon tilgjengelig fra sensorer
Hobbyking og Banggood selger MinimOSD men de har originalversjonen som ikke har ekstra pinner på siden for RSSI, batterispenning osv. Jeg ville ikke kontaktet dem hvis det er mulig å kjøpe MinimOSD KV Mod.
MinimOSD mikro

Nøyaktig samme OSD som beskrevet ovenfor, forskjellen er en mindre størrelse. I tillegg er det ingen 12V -> 5V omformer på den, men dette er ikke viktig, pga. uansett, ingen bruker denne omformeren på grunn av overoppheting av brettet.
BrainFPV
Dette brettet viser også hva som helst, med de riktige sensorene.

Betaflight OSD (Information On Screen) er integrering av informasjon fra ulike sensorer i videostrømmen via flykontrolleren. Vanligvis er OSD et ekstra installert kort, eller en allerede integrert brikke i flykontrolleren. OSD overfører informasjon som batterispenning, horisont, høyde og mer til hjelmen eller brilleskjermen.
Du kan også bruke OSD-menyen til å endre quadcopterens PID, filtre og andre innstillinger. I denne artikkelen vil jeg forklare hva Betaflight OSD er, hva den gjør og hvordan du setter den opp.
Betaflight OSD vs. MinimOSD (MWOSD)
Betaflight OSD er enklere og bedre enn MinimOSD:
- Den første er en allerede integrert brikke i flykontrolleren, du trenger ikke å lodde og koble til noe, mens MinimOSD er et eget kort som du må lodde alle komponentene til quadcopteret til, for eksempel en PC, kamera, video sender, og så videre, avhengig av hvilke sensorer du vil bruke mer. I tillegg trenger du en programmerer for å flashe denne modulen gjennom en datamaskin.
- Fordeler med Betaflight OSD: Enkelt oppsett da alt allerede er integrert. Konfigurasjonen skjer i Betaflight GUI. Du trenger ikke å lodde, flashe noe, du trenger ikke en programmerer og tredjeparts modulfastvare.
- Betaflight OSD-en opptar ikke en UART-port da den normalt er koblet til SPI-BUS.
Selv om nå MinimOSD allerede er ganske godt utviklet og har også et grafisk skall og lignende egenskaper.
Hvilke flykontrollere støtter Betaflight OSD
Ikke alle flykontrollere med integrert OSD støtter Betaflight OSD, noen krever ekstra OSD-oppsettprogramvare.
For øyeblikket støttes Betaflight OSD av følgende fly: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 og Betaflight F3.
Konfigurere Betaflight OSD
Sørg først for at du har den nyeste flykontrollerens fastvare, da OSD støttes på Betaflight-firmware V3.1 og nyere.
Hvis flyet ditt allerede har en integrert OSD-brikke, kobler du bare kameraet og videosenderen til de aktuelle portene.
Nedenfor er et eksempel på hvordan du kobler kameraet og senderen til DYS F4 Pro FC flykontrolleren, kameraet kobles til "Vin" og senderen til "Vout":
Koble nå til Betaflight Configurator, gå til fanen Konfigurasjon og slå på OSD:
Etter det, gå til OSD-fanen for å starte oppsett:
Hva kan være enklere enn dette grensesnittet? Bare slå på og av dataene du vil vise.
Videoformat - Velg PAL eller NTSC, avhengig av hvilken modus FPV-kameraet ditt er i. Hvis du ikke vet hvilken modus kameraet er i, setter du det til AUTO, programmet vil velge riktig format for at kameraet skal fungere.
Viktig informasjon: Hvis forhåndsvisningsskjermen er i PAL- eller AUTO-modus, og kameraet er i NTSC, vil dataene som vises nederst på skjermen bli kuttet av, dette er en funksjon i dette formatet, det har en kortere ramme. Når du bruker AUTO-formatet, er det best å plassere dataene du trenger midt på skjermen.
I «Alarm»-blokken kan du stille inn RSSI-verdier, batterikapasitet, tid før fly (stoppeklokke) og høyde. Så snart dataene begynner å samsvare med disse tallene, vil de begynne å blinke på skjermen til hjelmen eller brillene.
I forhåndsvisningsvinduet kan du dra de viste dataene som du vil, men ikke legg dem for nær kantene, fordi de da kan bli kuttet av.
- Batterispenningsvisning
- Flytid (stoppeklokke)
- Navn (eget)
- Gassverdier
- Hvor mye strøm bruker dronen
- Hvor mye mAh batterikapasitet er bortkastet
For å aktivere OSD-menyen i briller eller hjelm trenger du en kombinasjon av pinnebevegelser på fjernkontrollen:
- gass i sentrum
- yaw (yaw, akserulling) venstre
- pitch (pitch, tilt) fremover
Gassen må være midt i hele tuningen!
For å navigere gjennom menyen, bruk høyre pinne på fjernkontrollen. For å bla - hold deg opp eller ned, for å velge et menyelement - hold til venstre / høyre.
Her kan du endre PID-er, filtre, profiler og så videre. De fleste av disse innstillingene er selvforklarende hvis du allerede har konfigurert Betaflight gjennom OSD-fanen GUI. Men fortsatt er ikke alle elementene her, noen er bare tilgjengelige i selve konfiguratoren. Etter at du har gjort innstillingene, gå til hovedmenyen og klikk på " Lagre * Start på nytt«.
Hvordan endre font i Betaflight OSD
Hvis du ikke liker skriften som vises på skjermen, kan du enkelt endre den i Betaflight Configurator, for å gjøre dette, gå til OSD-fanen og det vil være en Font Manager-knapp nederst:
Etter at du har valgt en ny font, vil forhåndsvisningsvinduet fortsatt vise standardfonten, men du vil ha den du valgte med vernebriller og hjelm, så ikke bekymre deg.
Ofte stilte spørsmål
Hvorfor kan jeg ikke se data fra OSD i hodesettet?
Sjekk om du har spesifisert riktig videoformat, PAL eller NTSC, prøv å bytte. Hvis det fortsatt ikke fungerer, kontroller lednings- og loddekvaliteten fra kameraet og senderen til OSD-modulen.
Hvordan endre navnet?
I Betaflight, config-fanen, scroll ned, det vil være et tekstfelt "Craft name", du kan skrive inn et annet navn der.
I artikkelen vil vi vurdere å koble til, blinke og konfigurere MinimOSD. Og vi vil også svare på spørsmålet om hva du skal gjøre - hvis noe gikk galt, og hva du skal gjøre - slik at alt ikke ender trist.
« Petka - enheter!?!? -Tre hundre!!! -Hva er tre hundre??? -Hva med instrumentene?
MinimOSD. Billig og veldig nyttig skjerf. Lar deg se hva som skjer nå med copteret - strømspenningen, hvor mange ampere som er brukt, hvor mange globale posisjoneringssatellitter som er fanget, og lar deg heller ikke "gå deg vill" på himmelen. Det er umulig å gå seg vill på himmelen, sier du? Og her er det veldig mulig. Starter fra det elementære "det tok av, å, men alt er annerledes fra oven ... å, hvor er jeg selv?", og slutter med vanskelige flyforhold, for eksempel å fly i mørket eller i nedbør, eller ved et uhell fløy inn i skyen, som i videoen nedenfor:
I det fjerde minuttet var det bare lagringspilen "hjem" som indikerte hvor du skulle fly.
Ok, ok, nok tekster, la oss øve!
FORBEREDELSE.
Så du bestilte MinimOSD til deg selv. På Banggood eller Hobbyking eller RCTimer - uansett hvor, og fikk noe sånt som dette:
Hendene mine klør etter å koble den til arbeidsstasjonen og se hva den viser. Men du trenger ikke gjøre alt på en gang! Det er full av bestilling av en ny OSD - og dette er tapt tid (som er hovedsaken) og selvfølgelig tapte penger.
Det er to store brikker på brettet: ATMEGA328P og MAX7456. Den første mikrokretsen (mikrokontrolleren, for å være mer presis) er ansvarlig for kommunikasjonen med flykontrolleren (den "digitale delen" av tavlen). Og den andre er en enkanals monokrom OSD (OnScreenDisplay - meny på skjermen) fra Maxim, la oss kalle det den "analoge delen" av brettet. Så denne MAX7456 er en ganske lunefull mikrokrets. Hun liker ikke overoppheting, liker ikke skarpe hopp mellom den "digitale" bakken og den "analoge" - kort sagt, det brenner lett. Og heldigvis loddet den late kineseren ALDRI den vanlige kjøleribben til mikrokretsen (på "magen"). Hvis du bruker et lommetørkle i den formen det kom - MAX vil brenne - 80% garanti. For å forhindre at dette skjer, lodder vi tre hull merket på bildet nedenfor.

For å gjøre dette, sett inn en tynn loddemetall (1 mm i diameter, det er ønskelig at det er umiddelbart med fluss) inn i hullet og varm det opp med et loddejern:

Og her er resultatet (lodding er ikke veldig bra, men så godt jeg kan - du vil gjøre det bedre!)

Nå om funksjonene til tilkoblingen. Oppmerksomme folk la merke til at jeg loddet jumperen ovenfra. Det er flere måter å koble MinimOSD på, og mange kopier er ødelagte som er bedre eller mer korrekt eller gir mindre forstyrrelser. Jeg bruker koblingsmetoden med kombinasjonen av digital og analog jording og strømforsyning fra 5 volt fra den "digitale" delen. Siden minimOSD bruker ganske mye, er det bedre å drive brettet fra en separat strømkilde. Det ser nesten slik ut:

Det vil si at på toppen loddet jeg jumperen, og forener derved jordene. Og du må fortsatt slippe en jumper, på "forsiden" av brettet.

TILKOBLING OG OPPSETT
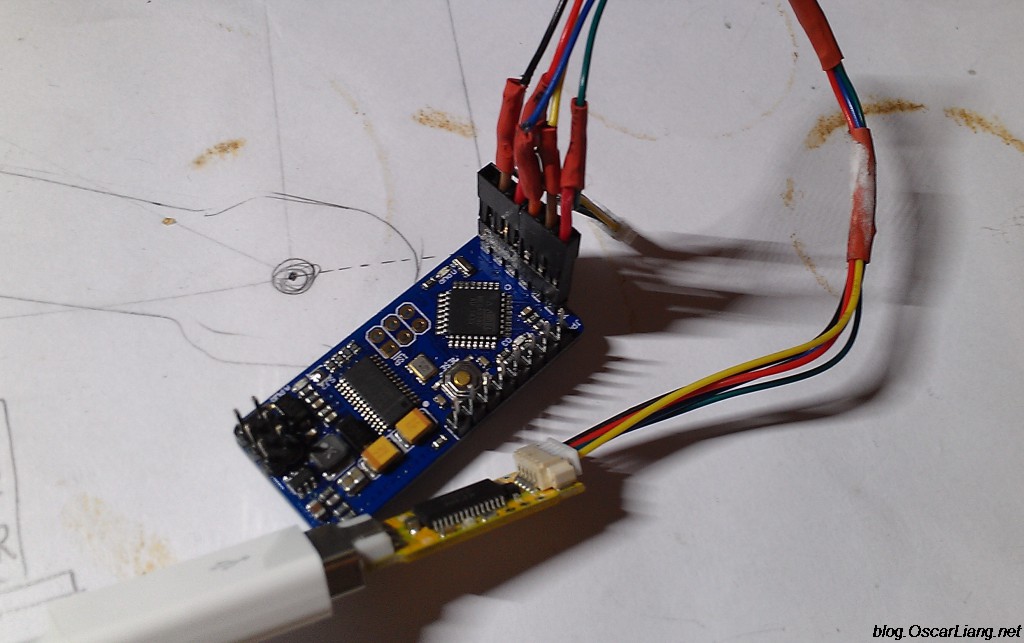
Vel, alt er loddet, nå er skjerfet vårt klart til å kobles til datamaskinen. For å gjøre dette trenger vi en FTDI-adapter (for eksempel på eller en annen USB-UART TTL-adapter).

Vi kobler til ved hjelp av 5 ledninger, koblingsskjemaet er som følger: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (på OSD-siden) - vi kobler dem til FTDI-adapteren 1. DTR , 2. Rxi, 3.Txo, 4.VCC, 5.GND. Her er et bilde av hvordan det er koblet for meg:

Hvis det ikke er tydelig, se denne videoen, spesielt nøye klokken 1:03
Nå, hva du skal laste ned og hvordan du konfigurerer. Til å begynne med vil jeg si at for copters og for fly er fastvaren annerledes. Det er også en fastvare for Multivia (kvTeam), og det er også separate mods - fra uavhengig arbeid (uten flykontroller), til å koble til selv til Naza.
Men her vurderer vi den "klassiske" saken - et copter på en AWP-kontroller. offisielle siden for prosjektet. nedlastingsside (for en copter under AWP må du laste inn ExtraCopter). Men dette er gamle versjoner, folk har modifisert ganske mye siden den gang. Moderne fastvare er i . Når dette skrives, er dette R800-fastvaren, den ligger (bruker MinimOSD_Extra, passord Top_Secret), på Ya.Disk.
Arkivet inneholder selve fastvaren (HEX - fil), en fil med fonter (mcm - fil), og selve programmet (OSD_Config.exe).
Først, la oss gå til enhetsbehandlingen og sjekke hastigheten på FTDI-porten (vi vil sette 115200):

Vi starter OSD_Config.exe-programmet, velg porten, trykk på "Les fra OSD" -knappen, det skal være en melding om vellykket lesing. Siden det ikke er kjent hvilken fastvare som er lastet inn fra fabrikken, for ikke å ha problemer i fremtiden, vil vi fylle den med en ny. For å gjøre dette, klikk på menyen Alternativer> Oppdater fastvare

velg en fil og last den opp.
Vi vil motta en melding om vellykket firmware

Deretter vil kontrolleren initialisere og laste innstillingene inn i programmet, som vil bli rapportert

Det er på tide å laste ned skriftfilen som samsvarer med fastvaren (hvis dette ikke gjøres, kan utseendet til OSD vise seg å være veldig morsomt eller til og med uleselig). Trykk på menyen Alternativ>Oppdater tegnsett,

velg MCM-fil og last den opp

Vi venter på beredskap

Etter helling initialiseres kontrolleren igjen.



La meg forklare litt:
RSSI-kanal - konverterer RSSI til prosenter. Hvor 5 volt er 255 (maksimalt i oktal). Og FRsky-mottakeren har et maksimalt signal på 3,3 volt. Hvis du merker av for RSSI-aktiver RAW, vil vi se "rå" data på FPV-skjermen. Det er dem vi kan kjøre inn i innstillingene. Eller du kan bare skrive inn verdiene mine.
En annen subtilitet - bytte OSD-skjermer. Som du kan se, er det to paneler for data. Vi kan bytte til tre visningsalternativer - skjerm1 (Panel1), skjerm2 (Panel2), blank skjerm uten data (Deaktivert). For å gjøre dette må vi først bestemme hvordan vi skal bytte mellom skjermer. For eksempel, hvis vi bytter mellom skjermer ved hjelp av en dreiebryter eller en vippebryter med tre posisjoner, vil vi ha tre verdiområder etter kanaler (Panel1: 0-1233, Panel2: 1233-1467, Deaktivert: 1467- 1701). I dette tilfellet må rotasjonsbryteren være slått av. Og hvis vi bytter med en enkel to-posisjons vippebryter, er det fornuftig å aktivere rotasjonsbytte. Samtidig, når vippebryteren er på, vil vi bytte skjerm etter tur (Panel1 -> Panel2 -> Deaktivert -> Panel1 ......), hvis vippebryteren er slått av, vil vekslingen mellom skjermer Stoppe. Hvilken kanal som vil bytte skjerm bestemmes i rullegardinlisten med tittelen OSD Toggle Channel. Jeg satte den på kanal nummer 6. Og det er et annet bakhold som noen (inkludert meg) i utgangspunktet er forvirrende - Advarsel Auto Panel Switch. Denne listen definerer hvilken skjerm du skal bytte til når noen av de tidligere definerte advarslene oppstår. Det ser ut til at alt er klart. Du flyr selv, noe skjedde mens du flyr, OSD byttet til skjermen du spurte om. Men her er spørsmålet - vi setter å bytte mellom skjermer, som regel er dette konfigurert hjemme, copteret flyr ikke, vi vil sjekke - skjermene bytter ikke! Men fordi det vanligvis ikke finnes GPS Fix hjemme - kort sagt, en advarsel fungerte! Så å bytte mellom skjermer "fungerer ikke" ... 🙂
Jeg vet ikke om resten av parameterne trenger avklaring, kanskje jeg supplerer artikkelen senere.
Jeg kan bare si at når du setter opp hovedskjermen, bør du ikke skyve alt dit på en gang. Det er bedre å slå av alt først (i kolonnen til venstre), og først deretter slå på bare det du trenger og umiddelbart plassere det i høyre del av skjermen. Jeg anbefaler å forlate et tomt rom i kantene av skjermen, det kan kuttes av en skjerm eller DVR med en pekepenn eller briller.
Neste, et annet viktig poeng - OSD-oppsett i Mission Planner. Anta at du har koblet alt som det skal, men i stedet for morsomme tall og kunstig horisont ser vi den kjedelige inskripsjonen "No Mavlink Data". Dette betyr at OSD-en fungerer, den vil gjerne vise deg noe, men den mottar ikke data. Det vil si at ingen data fra arbeidsstasjonen kommer til Rx-pinnen. Den første mulige årsaken er at ledningene er blandet sammen når de kobles til. Sjekk at Rx fra OSD er koblet til Tx-porten på arbeidsstasjonen. Den andre mulige årsaken er at selve kontrolleren ikke er konfigurert til å sende data til COM-porten. For å gjøre dette, i et enkelt tilfelle, på INITIAL SETUP > Optional Hardware > OSD-fanen, må du trykke på Aktiver Telemetri-knappen. Samtidig konfigurerer MP automatisk en rekke parametere som lar deg sende data til OSD. Hvis denne magiske knappen ikke hjalp, må du sette opp alt med små hender. For å gjøre dette, gå til KONFIG / TUNING > Full parameterliste-fanen, bla ned til bokstaven S, og kontroller (eller korriger) parameterverdiene:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Hvis dataene fortsatt ikke kommer, og vi fortsatt ser den kjedelige inskripsjonen "No Mavlink Data", må du sjekke om OSD-en er koblet til riktig port (artikkelen snakker om UART0), kan det hende du trenger SR1-parametrene ( det samme som beskrevet ovenfor, kun for UART1-port). Det er også mulig at OSD-en ikke fungerer for deg sammen med telemetrimodemet - i dette tilfellet må du kanskje koble til eller tvert imot koble fra Tx-ledningen på OSD-en. Det er også en feil at OSD-en ikke fungerer når USB-kabelen er koblet til datamaskinen. Eller kanskje du bare rotet til ledningene ...
Jeg deler ett bilde til. På kontrolleren min, på grunn av et krasj, sluttet hovedporten for telemetri å fungere, jeg loddet bare til UART0. Og så likte jeg denne forbindelsen.

Her drev jeg direkte fra kontrolleren. Men det er OBLIGATORISK å sjekke hva som er igjen av 5 volt til selve kontrolleren. I mitt tilfelle får selve kontrolleren strøm fra mottakeren, og der er den satt til litt høyere enn 5 volt, slik at, tatt i betraktning mottakeren og minimOSD, for selve APM var det strengt tatt 5 volt.
Et punkt til må berøres. Hvis OSD-en blinker feil, vises feilen " klarte ikke å snakke med bootloader". Denne feilen oversettes bokstavelig talt som "feil ved å snakke med oppstartslasteren." Det kan oppstå enten i tilfelle av sammenfiltrede ledninger, eller når bootloaderen krasjer. Hvis alt er klart når det gjelder ledninger (se ovenfor hvordan du kobler til riktig), er det nødvendig med en prosedyre for å gjenopprette mikrokontrolleren når det gjelder oppstartslasteren.
Gjenoppretter Bootloader.
For å gjøre dette trenger vi minst en programmerer. Det er mer praktisk å bruke USBasp.

kanskje du vil like denne adapteren (ISP10<>ISP6)
 eller denne kabelen (tilgjengelig på)
eller denne kabelen (tilgjengelig på)

Generelt, på en eller annen måte, kobler vi til ATMega328P ved hjelp av en programmerer.
Pinouten til ISP-kontakten på OSD-kortet er generelt akseptert. Vanligvis er den første kontakten firkantet. Hvis ikke, er det best å verifisere ved å se på Vcc og GND.

På programmereren er pinnene vanligvis signert, hvis ikke, ser det vanligvis slik ut:

For å gjøre dette, velg først type programmerer
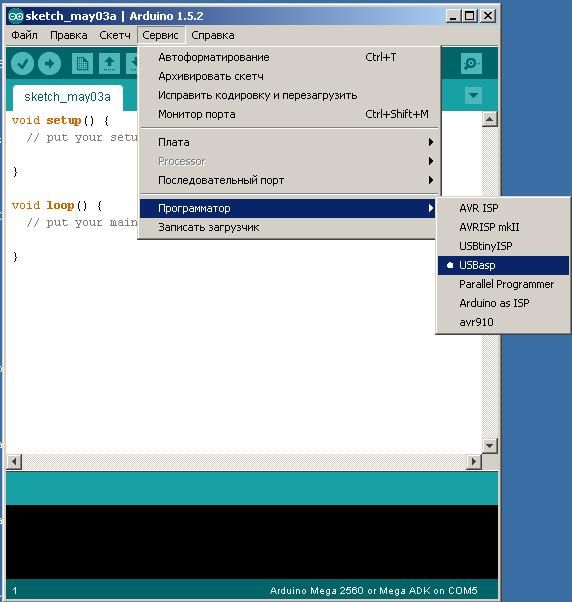
Velg deretter type brett

Og mikrokontroller type


og vent omtrent et minutt til oppstartslasteren er lastet (se på den grønne statuslinjen nederst)
 Inntil det vises en melding om at oppstartslasteren har blitt flashet
Inntil det vises en melding om at oppstartslasteren har blitt flashet

(vi tar ikke hensyn til feilene nedenfor, du må oppdatere fastvaren til programmereren)
Neste - gå til OSD_Config.exe, fyll inn fastvaren og skriftene, som allerede beskrevet. Du må kanskje laste opp fastvaren to ganger (en gang til er nødvendig for riktig initialisering av kontrolleren etter opplasting av oppstartslasteren).
Vel, det er omtrent alt. Plutselig, hvem vet ikke, er det mer. Hvis noe ikke er klart her, kan du "live" se det der.
Lykke til med å installere OSD på quad!
Alltid din, Ganiev Timur - 5yoda5.
5yoda5#apmcopter
Oppdatering 11.11.2015:"Vel, alt er loddet, nå er skjerfet vårt klart til å kobles til datamaskinen. For å gjøre dette trenger vi en FTDI-adapter (for eksempel på RCTimeren eller en annen USB-UART TTL-adapter).
Oppdatering 11/03/2016: Lagt til ISP pinout-bilder.
Hvis du finner en feil på siden, klikker du Shift+Enter eller for å varsle oss.
En spesiell enhet, Minim OSD, er utviklet for brukere av APM-kontrollere for å overlegge telemetridata. Forkortelsen OSD kommer fra den engelske On Screen Display, som betyr visning av tilleggsinformasjon på operatørens skjerm.
Kinesiske produsenter lager begge flykontrollere - HKPliot Mega, ArduFlyer og OSD-kontrollere - MAVLink-OSD.

Eksternt er Minim OSD ikke mye forskjellig fra MAVLink-OSD, det er som en speilkopi av brettet, hvor hovedbrikken roteres 45 grader. MAVLink-OSD har heller ikke jumpere for å velge type videosignal og kombinere kraften til de digitale og analoge delene.
Minim OSD v1.0 hadde problemer med overoppheting ved bruk av 12 volt kamerastrøm, dette problemet er løst i v1.1.
På grunn av at HK hadde leveringsproblemer i slutten av 2013, bestilte jeg MAVLink-OSD fra RCTimer.

For programmering trenger du definitivt en FTDI-adapter. Derfor, sammen med MAVLink-OSD, tok jeg umiddelbart FTDI Tool V1.0-adapteren http://www.rctimer.com/product_684.html .

For å konfigurere og flashe enheten, trenger du spesiell programvare kalt ArduCam-OSD. Last ned den nyeste ArduCam-OSD-programvaren og -fastvaren her http://code.google.com/p/arducam-osd/downloads/list . For øyeblikket er den gjeldende versjonen 2.0.
Du kan også installere alternativ firmware, prosjektet kalles minimosd-extra. Informasjon finner du her https://code.google.com/p/minimosd-extra/ . For fastvare trenger du ditt eget verktøy - MinimOSD-Extra Config Tool. Som regel inneholder arkivet et verktøy og fastvare. Du kan laste den ned her https://code.google.com/p/minimosd-extra/downloads/list . Øynene løper opp fra antall versjoner.
Jeg pakket brettet og adapteren inn i krympefolie.
Kontrollerkontakten for tilkobling er svært upraktisk, seks-pins, uten "idiotsikker" beskyttelse. Alle pinner brukes til programmering, men kun 4 pinner brukes for å koble til flykontrolleren.
For programmering gjenstår det å finne en mini-USB-kabel.

Når det gjelder firepinskontakten, er alt mer komplisert her. Hvis det blandes og kobles til feil, kan det komme røyk ut.
Kobler OSD til flykontrolleren i telemetrikontakten. Ledningen til OSD-en må kobles til de sentrale pinnene: GND, VCC, RX, TX.
Hvis vi bruker et radiomodem, kobler vi det parallelt. Så jeg måtte lodde Y-kabelen.

Bildet viser ledningen til AIOP-kontrolleren, der GPS også er koblet til én kontakt.
Jeg fjernet ikke ledningen som gikk til TX på OSD-en min, slik at den ville være universell, du vet aldri hvor jeg fortsatt vil bruke denne ledningen.
Det skal bemerkes at hvis du ikke legger på 5 volt til den analoge delen av brettet, vil brettet være stille.

Noen ressurser tilbyr å gjenskape brettet og drive den analoge delen fra den digitale, men jeg gjorde ikke dette, da det er en oppfatning at interferens kan forekomme.
For de som bestemmer seg for å koble til fra en strømkilde, vil kretsen være som vist på bildet.

Jeg har for øyeblikket den analoge delen drevet av en videosender, som jeg allerede snakket om i min forrige artikkel.
ArduCAM OSD-konfig
La oss starte med det opprinnelige ArduCAM OSD Config-verktøyet. For øyeblikket er den gjeldende versjonen 2.1.2.0.
Av hovedelementene skal programmenyen være uthevet, samt tre faner som bytter mellom følgende skjermer: Konfigurasjon, Panel 1, Panel 2.
Config, alt er veldig klart her.
Først av alt, velg portnummeret og klikk på Les fra OSD-knappen.

Det skal bemerkes at typen videosignal NTSC - PAL byttes gjennom menyen til Video Mode-programmet. Menyelementet Fil lar deg lagre og laste inn innstillingene dine, eller gå til standardinnstillingene. I Alternativer-menyen kan du aktivere rutenettmodus for Panel1 og 2, oppdatere fastvaren, velge bakgrunnsbilde, bruke loggen for innstillinger, legge til dine egne fonter.

Panel 1 brukes til å tilpasse informasjonen som vises over videoen for den første skjermen. Kanalbytte er satt til en ledig radiokontrollkanal OSD Toggle Channel.

Følgelig setter vi opp Panel 2 for den andre skjermen.

Fastvaren oppdateres med samme verktøy.

MinimOSD-Extra Config Tool
Når vi åpner MinimOSD-Extra Config Tool-programmet, ser det ut til at vi blandet sammen mappene og startet ArduCAM OSD Config igjen. Dette er førsteinntrykket, det er faktisk veldig likt, men det er flere innstillinger.
La oss se på hovedforskjellene.
Det første elementet er valg av modelltype: Plane, Copter.
Lagt til et alternativ for å automatisk bytte skjermen til den som er spesifisert i rullegardinmenyen (Automatisk panelbryter for advarsler) når en advarsel oppstår. Dette er nødvendig når for eksempel all informasjon fjernes på den andre skjermen slik at ingenting forstyrrer visningen.
Du kan velge å vise batteriet i prosent eller mA.
Og enda en Vis tegn før verdiblokk, som er ansvarlig for å vise ikoner før verdier.

Første skjerm

Andre skjerm

resultater
Først installerte jeg fastvaren via ArduCAM OSD Config.

Alt var i prinsippet normalt, men en nyanse var urovekkende, som kom til uttrykk i det følgende.
Etter å ha koblet til enheten la jeg merke til på skjermen at noe av informasjonen til venstre var avskåret. Ikonene foran parameterverdiene mangler halvparten. Jeg bestemte meg for å prøve å endre signaltypen til PAL, som et resultat ble det enda verre, det kuttet av toppen og bunnen av skjermen, så jeg returnerte den til NTSC. La det bare være på den ene siden, og ikke på tre, spesielt siden du kan prøve å rette opp denne mangelen til venstre.

Flyttet informasjon blokkerer ett tegn til høyre.

Operasjonen gikk smertefritt, det var nok plass til dette.


Som et resultat fungerte alt, ikonene er nå fullt synlige, informasjonen er perfekt lesbar på skjermen.
Men MinimOSD-Extra firmware 2.4 R726 ble installert, men det begynte å gi ut en slags skam på skjermen.

Bildet ble uleselig, informasjonen ble forvirret på hele skjermen.

Lastet ned tidligere versjon 2.2.

Med denne fastvareversjonen begynte informasjonen å bli vist uten forvrengning.

funn
Kompakt og rimelig enhet. Allsidig nok til å brukes med både originale ArduPilot Mega (APM)-kort og dets kloner HKPILOT Mega, ArduFlyer, samt med AIO (All-In-One)-seriekontrollere med MPNG- eller MultyWii-fastvare. Det er informasjon på forumene om tilkobling til DJI Naza-kontrollere, men dette krever arbeid med loddebolt i hendene.
Det eneste negative er seks-pins-kontakten på brettet, som vi kobler kabelen til med fire-pin-kontakten. Det kan være mange variasjoner, hvis du gjør en feil, kan du brenne brettet, siden det ikke er noen beskyttelse.
Du må også huske å gi strøm til de digitale og analoge delene av brettet, ellers vil det ikke fungere. Hvilken ernæringsmetode å velge, her vil det være mer praktisk for noen.
Selvfølgelig likte jeg MinimOSD-Extra mer, da det lar deg utføre flere innstillinger som ikke er i ArduCam OSD Config. Men som det viste seg, må vi fortsatt finne en stabil versjon. Jeg kom over det faktum at med noe fastvare blir utdataene til informasjon over videoen ødelagt. Jeg klarte å finne en fungerende versjon ikke første gang. Derfor var noen MinimOSD-Extra-alternativer ikke tilgjengelige for meg. Dessverre er dette et minus av mange åpen kildekode-prosjekter.
Derfor er det verdt å merke seg at ArduCam-OSD Config er mer stabil og velprøvd.
Kontrolleren utfører et kvalitetsoverlegg av informasjon på videoen, teksten ser ganske klar ut og lett å lese på en liten skjerm. Jeg la ikke merke til noen nedganger i visningen av informasjon.





