Фондацията за борба с корупцията на Алексей Навални успя да разбере, че самолетът се използва от длъжностно лице не само за полети до бизнес срещи, но и за извеждане на кучетата му на различни международни изложби и състезания. Радостта на гражданското общество от отворените пред него перспективи за идентифициране на слугите на хората, живеещи извън средствата им, обаче беше краткотрайна - споменатите по-горе служби изключиха възможността да наблюдават полетите на вицепремиера и кучетата му , а те пренебрегнаха всички въпроси относно законосъобразността на подобно решение.
Какво да правя?
Ако търговските услуги за проследяване на полети застанат на страната на държавата и откажат да публикуват информация за самолети, собственост на длъжностни лица, ние, гражданите, можем сами да получим тези данни. Прекарвайки около четири хиляди рубли за оборудване и няколко дни свободно време за монтаж и монтаж, всеки може да участва в проекта за независимо проследяване на въздушни превозни средства - ADSBexchange.com.
Как работи?
Всеки съвременен самолет е оборудван с т. нар. ADS-B транспондер - устройство, което предава информация за себе си на определена честота в отговор на заявка от радарна станция (радар) - уникален идентификатор на самолета, както и данни за местоположение, скорост на полета и някои други. Важното тук е, че всеки може да приеме и декодира тази информация, като използва свободно достъпна евтина домакинска техника - USB цифров телевизионен приемник от стандарта DVB-T, свързан към едноплатков компютър Raspberry Pi с работеща програма за декодиране на него.
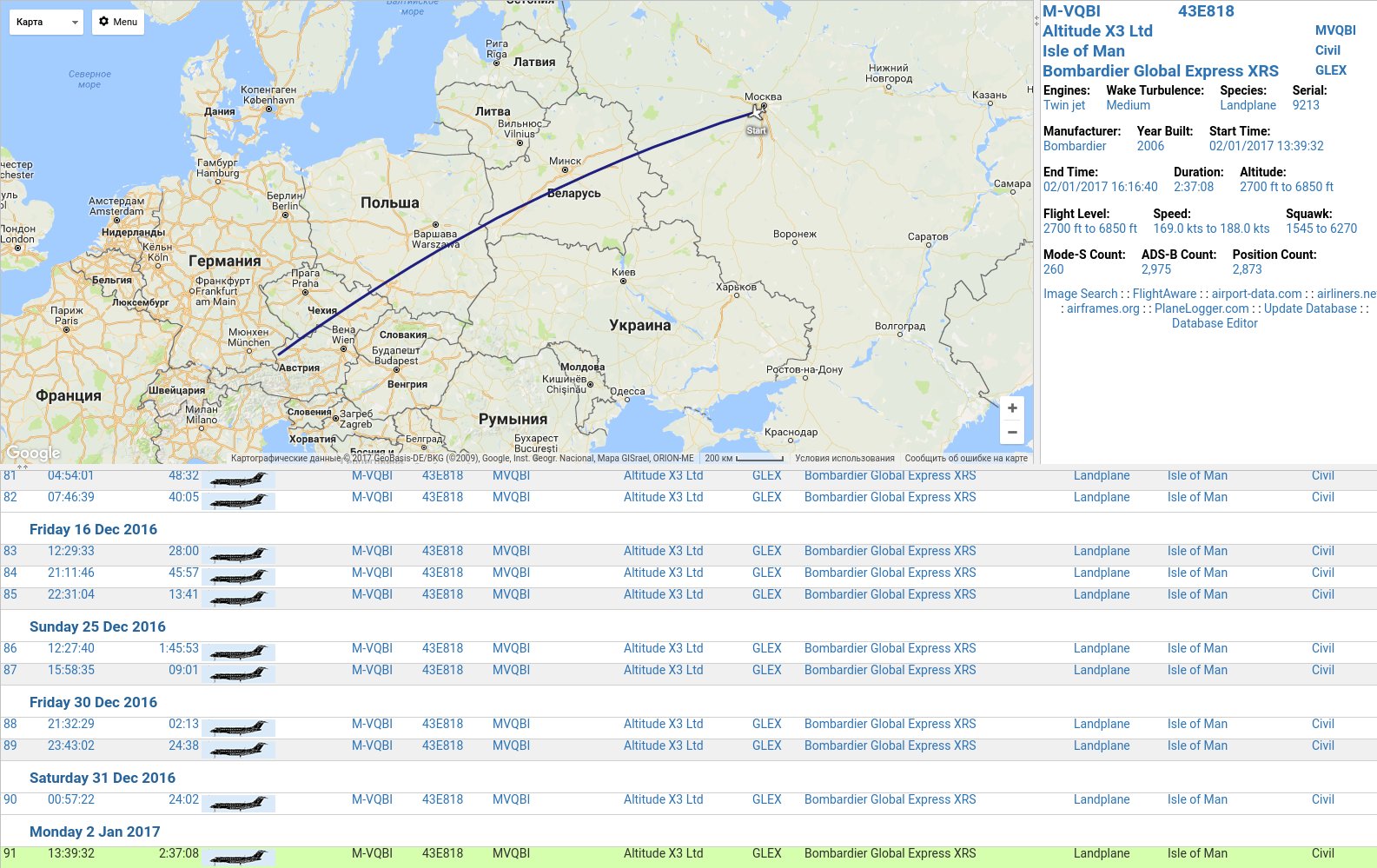
Декодирана информация за въздухоплавателно средство в рамките на видимостта на приемника може да се види локално, но за проследяване на целия маршрут на самолета от точката на излитане до местоназначението е необходимо да се комбинира информацията, получена от приемниците във всички междинни точки . Точно за това е предназначена услугата ADSBexchange.com, създавайки глобална карта на полетите – Global Radar View на базата на данни, получени от местни приемни станции – която е функционално подобна на тази на услуги като PlaneFinder.net и FlightRadar24. com, но за разлика от тях не крие информация за проследяваните самолети от крайните потребители. Например, можем да видим, че на новогодишните празници вицепремиерът отново отлетя до дачата си в Австрия:
Колкото повече приемни станции са свързани към услугата, толкова по-пълно е покритието, а в случая с Русия ситуацията все още е много тъжна - просто погледнете картата и сравнете броя на станциите, които имаме, с броя на станциите в Европа .

Но в нашата сила е да променим сегашната ситуация! За да направите това, просто трябва да изградите своя собствена приемна станция и да я включите в мрежата на ADSBexchange.
Какво е необходимо за това?
1. Raspberry Pi
Най-популярният едноплатков микрокомпютър в света, има няколко модела, които се различават по размер на паметта, честота на процесора и набор от периферни устройства. За нашите цели всеки модел с Ethernet порт на борда е подходящ, например Raspberry Pi 3 Model B:

Можете да го купите заедно със захранването и калъфа на Aliexpress за около 3000 рубли, например. Можете също да търсите от местни продавачи, но цената, разбира се, ще бъде значително по-висока.
2. Карта с памет
Raspberry Pi 3 изисква microSD карта, по-ранните модели използват SD карта в пълен размер. Препоръчителен обем - 8GB, скоростен клас - 10. От доверени производители мога да препоръчам карти SanDisk или Transcend. Цената на въпроса е около 300 рубли.
3. USB DVB-T приемник

Ключовите думи за търсене в Aliexpress са "RTL2832U R820T2", цената е около 500 рубли, например, така. Можете да разгледате местните продавачи, но приемник, който изглежда абсолютно същият, може да се окаже, че е изграден върху други чипове, така че трябва да проверите с продавача дали пакетът RTL2832U + R820T2 е вътре.
4. Антена
Към USB приемника е включена антена, но той, меко казано, не е подходящ за приемане на сигнали от самолетни транспондери, така че обхватът на приемане с него ще бъде малък - поне няколко десетки километра. За да се получи радиус от стотици километри, той ще трябва да бъде заменен с по-подходящ. Най-лесният вариант е да замените стандартния щифт на антената с триелементна колинеарна антена, която може да бъде огъната от медна или стоманена тел според следния чертеж (с възможност за щракване):

Трябва да завършите с нещо подобно:

Най-добрият вариант, осигуряващ максимален обхват на приемане до 400 км, е използването на коаксиална колинеарна антена.
Тъй като приемането на радиосигнали от транспондерите на самолета е възможно само в рамките на линията на видимост, антената трябва да бъде поставена на открито, в идеалния случай на покрива. За да направите това, можете да използвате или USB удължителен кабел с дължина до 5 метра, като поставите само приемника в запечатана кутия, или PoE (в този случай ще трябва да поставите и Raspberry Pi в кутията).
5. Мека
Понастоящем ADSBexchange използва модифицирана дистрибуция на PiAware. Тази дистрибуция е разработена от FlightAware, която също предоставя комерсиална услуга за проследяване на самолети, но, уви, в оригиналния си вид крие и информация за частни самолети. Тази дистрибуция е взета като основа за ADSBexchange, тъй като е много лесна за инсталиране и конфигуриране.
Инструкции стъпка по стъпка за Windows:
- Изтеглете дистрибуцията https://www.adsbexchange.com/downloads/ADSBexchange-img-1.2.zip (868 MB) и я запазете на вашия компютър.
- Разархивирайте файла ADSBexchange-img-1.2.zip.
- Изтеглете помощната програма Win32DiskImager и я стартирайте като администратор (за да направите това, щракнете с десния бутон върху файла и изберете "Изпълни като администратор").
- Изберете файла ADSBexchange-img-1.2.img.
- Поставете SD картата в четеца на карти на вашия компютър.
- Изберете буква на SD карта от съответния списък.
- Щракнете върху "запис" и изчакайте да приключи за няколко минути.
- Когато приключите, извадете картата с памет от четеца на карти и я поставете в Raspberry Pi.
- Свържете всички кабели (USB захранване, Ethernet кабел, USB приемник) към Raspberry Pi. В този случай на Raspberry Pi червеният светодиод трябва да свети и зеленият трябва да мига, а близо до Ethernet мрежовия конектор - зелен и жълт.
- Изчакайте няколко минути, за да се стартира Raspberry Pi.
- Регистрирайте нов акаунт на уебсайта на FlightAware.
- Свържете приемника към създадения акаунт.
- В настройките на приемника (раздел "My ADS-B") редактирайте координатите на местоположението на приемника и височината на антената над нивото на земята.
- След известно време приемникът трябва да се появи на картата на покритие https://www.adsbexchange.com/active-feeds/.
- Самолетът, който в момента се проследява от вашата приемна станция, може да бъде видян, като следвате връзката "Уеб интерфейс: преглед на данни на живо" в раздела "My ADS-B" на уебсайта FlightAware.
ПЕЧАЛБА!
Сега вашият приемник участва едновременно в две мрежи за проследяване на полети - ADSBexchange и като бонус FlightAware. Разпространете тази инструкция, помогнете на другите да изградят своите приемни станции и кучето-бягство на Шувалов няма да може да се скрие от всевиждащото око на гражданското общество!
Притежавайки уменията за работа с микроконтролери, радарът може да бъде направен самостоятелно с помощта на микросхеми, набор от проводници, инфрачервен сензор и други устройства. Също така трябва да имате диаграма за по-нататъшно сглобяване.
Ще имаш нужда
- - умения за работа с радиотехника и микроконтролери.
Инструкции
Не знаехте как да настроите или оптимизирате радара в CS GO? В тази тема просто ще разгледаме настройките на радара в CS Global Offensive.Какво е необходимо за настройка на радар? Всичко се прави много просто, не е необходимо да изтегляте допълнителен софтуер, всичко, от което се нуждаете, е:
Включване на конзолата
Ако имате проблеми с отварянето на конзолата, следвайте инструкциите по-долу:
- Стартирайте CS: GO;
- Настройки → Игрови настройки;
- Активиране на конзолата за програмисти -> да;
- Настройки → Клавиатура/мишка;
- Превъртете до дъното и ще видите, че "Отворена конзола" се включва " ` "- можете да зададете всеки свой собствен ключ.
Сега можете да започнете да настройвате!
Настройка на радара
Първото нещо, което бих ви посъветвал, е да създадете игра с ботове, за да не могат да ви убият и вече в играта да се заемете с настройката на радара. Да започваме:
Включете/изключете радара
Да се включи radar, трябва да напишете командата drawradar в конзолата;
Да се Криярадар, се използва конзолната команда hideradar;
cl_hud_radar_scale
Тази команда е отговорна за размера на радара на вашия екран.
 |
|
| cl_hud_radar_scale "0,8" | cl_hud_radar_scale "1.3" |
| Минимум: "0,8" // Максимум: "1,3" | |
cl_radar_always_centered
Играчът винаги е в центъра на радара. На пръв поглед може да изглежда, че няма голяма разлика, но плюсът е очевиден - когато сте в ъгъла на картата - имате по-голяма видимост на терена на радара, отколкото ако сте в центъра на радар.
 |
 |
| cl_radar_always_centered "0" | cl_radar_always_centered "1" |
| Има две променливи за избор, 0 или 1 | |
cl_radar_icon_scale_min
Тази команда преоразмерява различните икони на вашия радар.
| cl_radar_icon_scale_min "0.4" | cl_radar_icon_scale_min "1.0" |
| Минимум: "0,4" // Максимум: "1,0" | |
cl_radar_rotate
Включва и изключва въртенето на радара. Тези. ако е деактивирано, картата на радара винаги ще бъде на една и съща позиция.
 |
 |
| cl_radar_rotate "0" | cl_radar_rotate "1" |
| Може да се настрои на 0 или 1 | |
cl_radar_scale
Променяме мащаба на картата, показана на радара.
 |
 |
| cl_radar_scale "0,25" | cl_radar_scale "1.0" |
| Минимум: "0,25" // Максимум: "1,0" | |
cl_hud_bomb_under_radar
Тази команда активира или деактивира показването на иконата на бомбата, когато я носите или когато я нямате.
Динамично преоразмеряване на радар
Има моменти, когато мащабът на картата на радара трябва да бъде увеличен или обратно, намален. Това може да стане с помощта на свързването по-долу:
Bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05"; // увеличаване на размера на радара свързване "KP_minus" "incrementvar cl_radar_scale 0.25 1.0 -0.05"; // намаляване на размера на радара
Това свързване позволява бутона + или - динамично преоразмерете радаракогато натиснете. Бутоните могат да бъдат всякакви по ваша преценка.
Стандартни настройки на радара
cl_hud_radar_scale "1"; cl_radar_always_centered "1"; cl_radar_icon_scale_min "0,6"; cl_radar_rotate "1"; cl_radar_scale "0,7"; cl_hud_bomb_under_radar "1";На един от моите ученици хрумна идеята да създаде някакъв радар за определяне на разстоянието. Продължихме да го развиваме и решихме да го въведем в програмата на курса като един от проектите.
След няколко седмици подготовка най-накрая разбрахме как да го започнем и какво може да се наложи да направим. Проектът не трябваше да бъде много напреднал; ние задаваме нивото на трудност на средно. По-долу е даден пример за използване на персонален радар с тесен обхват. Трябваше да изглежда малко смешен, за да се смееш!
Описание и цел на проекта
Целта на проекта беше да се създаде работещ радар. Системата трябва само да измери разстоянието под ъгъл от 90 градуса, както е показано в примера по-горе. В зависимост от избрания сензор, системата работи в рамките на 4-30 cm, 20-150 cm и 1-5.5 m.
Резултатите от проекта ще повлияят на последващите разработки, в които ще се опитаме да интегрираме радар за навигация на мобилни роботи in vivo.
Електронни части
- Стабилизатор на напрежение LM7805 5 V
- Микроконтролер PIC18F452
- IR сензор GP2D120
- Кварцов резонатор на 4 или 8 MHz
- Превключете
- кондензатор
- 30-пинов конектор
- 5 тригера 74LS373
- Дъска за хляб
- Спойка
- 36 индикатора
- Тел 30 AWG
- Тел инструменти
- Поялник
Подробен списък на резервните части
Може да знаете или не знаете всичко за горните подробности, така че е включена снимка на всеки детайл, за да ги изясните. Има три нови обекта, които преди това не бяха посочени в проекта: серво система и IR сензори. Описание на IR сензорите ще се появи скоро; що се отнася до 74HCT373, по-долу ще бъде представен кратък преглед. Винаги можете да проверите спецификациите на чипа, просто като потърсите "74HCT373".

Осембитова микросхема, съдържаща тристабилен тригер. Просто казано, този чип е в състояние да съхранява 8 бита цифрова логика и да я държи в паметта, докато не бъде изтрита или променена чрез щифта за активиране на LE-Latch.
Принципи на работа
- Контролни щифтове LE и OE
- 8 Въвеждане на данни D0-D7
- 8 Изход на данни D0-D7
Захранване (Vcc & GND.)
Активирането на изхода (OE) позволява на Q0-Q7 да изведе данните в момента в D тригерите.
Активирането на тригер (LE) позволява данните, съдържащи се в D0-D7, да бъдат презаписани в D-тригера.
Преглед на схемата
Схемата за този проект е много по-сложна от предишните. Има 4 основни предимства в нашето развитие.
- Ще можем да програмираме изображения от разработената платка.
- Ние ще контролираме серво системата.
- Ще вземаме данни от IR сензора за разстояние.
- Ще инсталираме 36 LEB индикатора за показване на изходните данни от IR сензора.
Характеристики на веригата
Хранене
- Захранването се захранва чрез 9V батерия, свързана към LM7805 с 1uF кондензатор, свързан към щифт/земя, за да осигури непрекъснат постоянен ток към LM7805.
- Програмен цикъл
- Програмирането се извършва чрез свързване на два конектора от контролера към програмиста, което дава на първия конектор на програмиста достъп до MCLR * / Vpp-Pin1 на контролера. От съображения за безопасност е инсталиран изправителен диод.
- IR сензор за разстояние
- IR сензорът използва един контролен конектор PIN 2 - RA0. Аналоговите възможности на този изход се използват за получаване на стойността на ADC, тъй като само аналоговият сигнал се взема от IR сензора. Тази стойност ви казва дали има нещо в обхвата на сензора.
LED индикация
Има общо 40 LED индикатора. Всеки чип 74HCT373 управлява до 8 индикатора; тъй като 40/8 = 5, имаме нужда от 5 вериги 74HCT373, за да управляваме всичките 40 индикатора. В диаграмата трябва да се отбележи, че за всичките 5 чипа се използва една шина за данни.
теория
Тази разработка използва три основни инструмента за създаване на персонален радар. IR сензорът е свързан към микроконтролера и след това се показва на сегмента на индикатора. Предлага се визуална демонстрация на този процес:
Използване на различни сензори
Важен аспект на точността на IR сензорите, използвани в този проект, е, че те имат еднакви характеристики на напрежението, така че тази програма е съвместима с всички индикатори. Единственото нещо, което трябва да знаете, е как сензорът се използва за определяне на разстоянието, показано на индикаторите.
Използване
И така, нека да разгледаме окончателния вид на устройството:

Това е външният вид на сглобеното устройство. Нека да преминем към следващия раздел и да продължим сглобяването на устройството.
Пластмасовият калъф в долната част на снимката не е споменат в списъка с части. Това е често срещан случай, който може да бъде закупен от всеки производител или търговец на електроника. Първата стъпка е да пробиете 36 дупки за индикаторите във веригата и да фиксирате индикаторите в тях. Преди поставянето на индикаторите в отворите се използва фиксиращ агент.

След като панелът е запоен, започваме да свързваме веригата. Всеки проводник трябва да бъде свързан през малък отвор в кутията.

Фигурата по-горе показва ранен изглед на панела. В началото на свързването на проводниците има натрупване на огромен брой от тях, например, като това:


Последният щрих в разработването на личен радар е възможността да се използва онлайн. Проводниците са дълги 2-4 метра при свързване на серво системата и IR сензора. Правим дупка в предната част на кутията за тези проводници:
След като приключим със сглобяването, нека да преминем към софтуерната част от разработката. Това е далеч по-фина част от развитието, отколкото дори прокарването на проводниците.
Софтуерът за този инструмент се състои от три основни части:
- Серво управление
- Управление на LED индикация
- вход A / D /
Тъй като целият софтуер за този проект няма да се побере на една страница, ще бъде обяснено какви са тези части и как работят.
Серво управление
Серво системата се управлява от таймери и прекъсвания. Две отделни прекъсвания, задействани едновременно, за да създадат желания звук, генерират сигнал от 50 GHz и стрелката на сервото се движи на малки стъпки, за да регулира скърцащия звук.
Регулиране на LED индикация.
Индикаторите се управляват от тригерите 74LS373 / 74HCT373. Системата постоянно актуализира данните за задействане, показани на индикаторите.
A/C вход
IR сензорът осигурява аналогов изход. За определяне на стойността на напрежението се използва преобразувател, който съобщава, че обектът се е преместил извън обхвата на IR сензора.

Монтажът и конфигурацията на устройството са завършени - трябва да го тествате. В зависимост от сензора, който използвате, индикацията ще бъде различна. Избираеми сензори GP2D120, GP2Y0A21YK и GP2Y0A700K0F.
Данни и наблюдения
Първият тест на радара ще бъде тест от близко разстояние. Тенекиени кутии бяха използвани като препятствия.
На второто видео (на първата страница) се тестват показатели от 20 см - 150 см и 1 м - 5,5 м, позволяващи преодоляване на по-сериозни препятствия. Погледнете, за да видите за какво става въпрос.
Два видеоклипа ще демонстрират работата на сензора, но при самостоятелно сглобяване са възможни леки трудности, които ще бъдат описани в заключението.
О преглед на личния радар
Сглобяването и конфигурирането на това устройство отнема малко време. Това е проект, който можете да направите за един ден и той вече има ниша в приложението, но с течение на времето ще възникнат допълнителни трудности. IR сензорите могат да станат ненадеждни, а изходните резултати могат да бъдат малки поради влиянието на околната среда и околната среда.
Действия, които трябва да бъдат предприети
За увеличаване на радиуса на покритие на сензора се планира използването на ултразвукови сензори, които са еквивалентни на гореописаните "звукови сензори", предаващи данни за разстоянието от вас до обекта. Ултразвукът има по-широк обхват от инфрачервения и е по-надежден в сурови условия.
Заключение
Проектът беше забавно изследване на инфрачервени сензори. Това показва, че резултатите могат да бъдат реалистично получени и използвани. Въз основа на това могат да бъдат разработени много други проекти.
Как да направите голям радар в CS: GO, за да видите цялата карта?
Ако играете със стандартни настройки на радара, няма да можете да видите цялата карта. Опитните играчи постоянно държат радара в полезрението (разбира се, не буквално, но разбирате идеята). Това е необходимо, за да се разбере къде са както членовете на отбора на играча, така и опонентите (или поне къде са били опонентите наскоро).
Враговете са обозначени на радара с червени точки. В рамките на няколко секунди след изчезването на противника от полезрението на радара се показва червен въпросителен знак.
Ето как да включите радара в cs go - drawradar
Ето как да изключите радара в cs go - hideradar
cl_radar_icon_scale_min 0.6 - размер на иконите на радара (диапазон: 0 до 1)
cl_radar_scale 0.4 - мащаб на картата (диапазон: от 0.2 - 1)
cl_radar_always_centered 0 - изместване на центъра на радара към видимостта на картата, 1 - вие сте центърът на радара
cl_radar_rotate 1 - активиране на завъртане на картата, 0 - деактивиране
cl_hud_radar_scale 1 - размер на радара (диапазон: 0,8 до 1,3)
hud_scaling 0,95 - размер на интерфейса (0,95 до 0,5)
drawradar - включва радара
Ако отново искате да изключите радара в cs go, напишете тази команда в конзолата:
hideradar - изключва радара
Как да настроите радар в CS: GO с помощта на конзолни команди?
Често използвах радарния изглед на картата.
Например, ако съм в точка А и членовете на моя екип се втурнаха към точка Б и нямам време да разбера в чата, тогава това ще бъде ясно видимо на радара. Освен това, ако някой от вашия екип забележи терорист с бомба, тя ще бъде показана на радара.
Тази екранна снимка показва какво искаме да постигнем:
- Радар, на който играчът винаги е в центъра.
- Радар, на който се вижда цялата карта.
- Увеличен радар (увеличен).
- По-големи икони. Това ще улесни откриването на членовете/враговете на вашия екип (по избор).
- Миникарта (като цяло).
Сега да преминем към настройките. Ще трябва да ги добавите към вашия файл, наречен config (наричан още autoexec). Ще разгледаме всяка настройка по ред. Така ще знаете за какво отговаря и ще можете да персонализирате радара според вашите предпочитания.
Ако имате нужда само от настройки, можете да превъртите надолу по страницата. Те са дадени в самия край на статията.
На първо място, нямаме нужда от радар, който винаги ще бъде центриран, тъй като в този случай се губи много пространство на екрана, когато е близо до границата на картата.
За да направите това, променете параметъра в съответния ред на "0":
cl_radar_always_centered “0”

Виждаш ли? Почти половината от пространството е заето от черната зона. Ако радарът не винаги е центриран, тогава можем да видим големи области от картата.
Следващото нещо, което трябва да направим, е да намалим картата. По този начин можем да видим още повече.
Задайте следната стойност на параметъра:
cl_radar_scale “0,3”

Преди това не можехме да видим цялата карта. След промяна на настройките всички области на картата се показват постоянно на радара. Това е много удобно, когато се респаунирате, когато не знаете къде са членовете на вашия екип - винаги можете да ги видите.
Скрипт за увеличаване на размера на радара (Zoom скрипт)
Измислихме малък скрипт, който ви позволява да увеличавате / намалявате размера на радара, това може да стане с просто натискане на "+" или "-".
Във вашия конфигурационен или autoexec файл посочете следното:
// Мащабиране на радара
свързване “KP_plus” “incrementvar cl_radar_scale 0.25 1.0 0.05”;
свързване “KP_minus” “incrementvar cl_radar_scale 0.25 1.0 -0.05”;
Когато намалите размера на радара, някои детайли може да бъдат пренебрегнати. За да компенсираме това неудобство, можем да приближим радара.
За да направите това, трябва да използвате командата:
cl_hud_radar_scale “1,15”

Както можете да видите, мащабът се е увеличил. Изчислих, че 1,15 е оптималното съотношение, което ви позволява да различавате детайлите без проблеми, но в същото време радарното изображение не заема много място на екрана. Можете да експериментирате с други стойности.
Тази стъпка не е задължителна, но аз я използвах. Той увеличава размера на иконите, показани на радара, което също може да бъде полезно.
cl_radar_icon_scale_min „1“

Крайни настройки на радара в CS GO
Сега можем да оценим променените настройки на радара, на който непрекъснато се вижда цялата карта. Сравнете ги със стандартните параметри:

Получи се много яко.
Единственият недостатък на новите настройки е ниското ниво на детайлност на картата, но когато размерът на радара се увеличи, детайлите стават по-лесни за разграничаване. Ако обаче познавате добре картата, това няма да затрудни живота ви много.
Оптимизирани настройки на радара (настройки по подразбиране)
cl_radar_always_centered “0” (“1”)
cl_radar_scale “0,3” (“0,7”)
cl_hud_radar_scale “1,15” (“1”)
cl_radar_icon_scale_min „1“ („0,6“)
Два параметъра останаха непроменени:
cl_radar_rotate “1”
cl_radar_square_with_scoreboard „1“