Anti-Corruption Foundation til Alexei Navalny klarte å finne ut at flyet brukes av en tjenestemann, ikke bare for flyreiser til forretningsmøter, men også for å ta ut hundene hans til forskjellige internasjonale utstillinger og konkurranser. Sivilsamfunnets glede over mulighetene som åpnet seg før det åpnet for å identifisere tjenerne til folket som lever over evne var imidlertid kortvarig - tjenestene nevnt ovenfor slo av muligheten til å overvåke flygingene til visestatsministeren og hans. hunder, og de ignorerte alle spørsmål om lovligheten av en slik avgjørelse.
Hva å gjøre?
Hvis kommersielle flysporingstjenester står på statens side og nekter å publisere informasjon om fly som eies av tjenestemenn, kan vi, innbyggere, få tak i disse dataene selv. Ved å bruke rundt fire tusen rubler for utstyr og et par dager med ledig tid for montering og installasjon, kan alle delta i prosjektet med uavhengig sporing av luftkjøretøyer - ADSBexchange.com.
Hvordan det fungerer?
Hvert moderne fly er utstyrt med en såkalt ADS-B-transponder - en enhet som overfører informasjon om seg selv med en viss frekvens som svar på en forespørsel fra en radarstasjon (radar) - en unik identifikator for flyet, samt data på plassering, flyhastighet og noen andre. Det viktige her er at hvem som helst kan akseptere og dekode denne informasjonen ved å bruke fritt tilgjengelig billig husholdningsutstyr - en digital USB-TV-mottaker av DVB-T-standarden, koblet til en Raspberry Pi enkeltbrettsdatamaskin med et dekoderprogram som kjører på den.
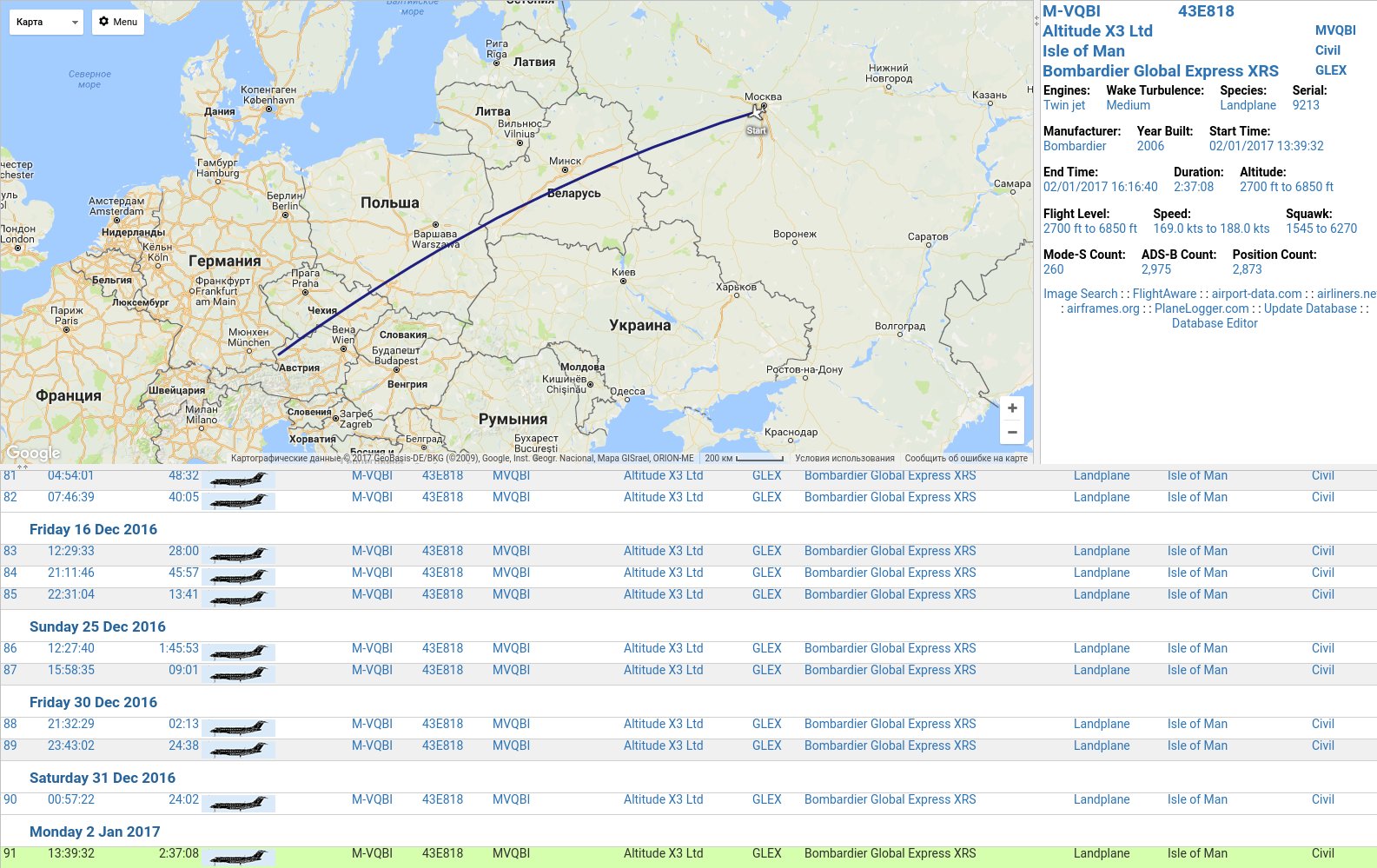
Den dekodede informasjonen om fly innenfor siktelinjen til mottakeren kan sees lokalt, men for å spore hele flyruten fra avgangspunktet til destinasjonen, er det nødvendig å kombinere informasjonen mottatt fra mottakerne i det hele tatt. poeng. Dette er nøyaktig hva ADSBexchange.com-tjenesten er designet for, og skaper et globalt kart over flyreiser - Global Radar View på grunnlag av data mottatt fra lokale mottaksstasjoner, funksjonelt lik tjenesten til tjenester som PlaneFinder.net og FlightRadar24.com, men, i motsetning til dem, skjuler den ingen informasjon om sporede fly fra sluttbrukere. For eksempel kan vi se at på nyttårsferien fløy visestatsministeren igjen til sin hytte i Østerrike:
Jo flere mottaksstasjoner som er koblet til tjenesten, jo mer komplett er dekningen, og i Russlands tilfelle er situasjonen fortsatt veldig trist - bare se på kartet og sammenlign antall stasjoner vi har med antall stasjoner i Europa .

Men det er i vår makt å endre dagens situasjon! For å gjøre dette trenger du bare å bygge din egen mottaksstasjon og inkludere den i ADSBexchange-nettverket.
Hva trengs for dette?
1. Raspberry Pi
Den mest populære enkeltkorts mikrodatamaskinen i verden, det er flere modeller som er forskjellige i minnestørrelse, prosessorfrekvens og et sett med periferiutstyr. For våre formål er enhver modell med Ethernet-port ombord egnet, for eksempel Raspberry Pi 3 Model B:

Du kan kjøpe sammen med strømforsyningen og dekselet på Aliexpress for for eksempel 3000 rubler. Du kan også søke fra innenlandske selgere, men prisen vil selvfølgelig være betydelig høyere.
2. Minnekort
Raspberry Pi 3 krever et microSD-kort, tidligere modeller bruker et SD-kort i full størrelse. Anbefalt volum - 8GB, hastighetsklasse - 10. Fra pålitelige produsenter kan jeg anbefale SanDisk eller Transcend-kort. Prisen på problemet er omtrent 300 rubler.
3. USB DVB-T mottaker

Nøkkelordene for søk på Aliexpress er "RTL2832U R820T2", prisen er omtrent 500 rubler, for eksempel som dette. Du kan se på lokale selgere, men mottakeren, som ser helt lik ut, kan vise seg å være bygget på andre brikker, så du må sjekke med selgeren at RTL2832U + R820T2-pakken er inne.
4. Antenne
En antenne følger med USB-mottakeren, men den er mildt sagt dårlig egnet til å motta signaler fra flytranspondere, så rekkevidden på mottaket med den vil være liten - minst flere titalls kilometer. For å få en radius på hundrevis av kilometer, må den erstattes med en mer passende. Det enkleste alternativet er å erstatte standard antennepinnen med en tre-elements kolineær antenne, som kan bøyes fra kobber eller ståltråd i henhold til følgende tegning (klikbar):

Du bør ende opp med noe slikt:

Det beste alternativet, som gir en maksimal mottaksrekkevidde på opptil 400 km, er å bruke en koaksial kolineær antenne.
Siden mottak av radiosignaler fra flytranspondere kun er mulig innenfor siktelinjen, bør antennen plasseres utendørs, ideelt sett på taket. For å gjøre dette kan du enten bruke en USB-forlengelseskabel på opptil 5 meter, bare plassere mottakeren i en forseglet boks, eller PoE (i dette tilfellet må du også plassere Raspberry Pi i esken).
5. Myk
For øyeblikket bruker ADSBexchange en modifisert PiAware-distribusjon. Denne distribusjonen ble utviklet av FlightAware, som også tilbyr en sporingstjeneste for kommersielle fly, men dessverre, i sin opprinnelige form, skjuler den også informasjon om private jetfly. Denne distribusjonen er tatt som grunnlag for ADSBexchange, da den er veldig enkel å installere og konfigurere.
Trinn-for-trinn-instruksjoner for Windows:
- Last ned distroen https://www.adsbexchange.com/downloads/ADSBexchange-img-1.2.zip (868 MB) og lagre den på datamaskinen din.
- Pakk ut ADSBexchange-img-1.2.zip-filen.
- Last ned Win32DiskImager-verktøyet og kjør det som administrator (for å gjøre dette, høyreklikk på filen og velg "Kjør som administrator").
- Velg filen ADSBexchange-img-1.2.img.
- Sett inn SD-kortet i datamaskinens kortleser.
- Velg en SD-kortbokstav fra den tilsvarende listen.
- Klikk "brenn" og vent til det er ferdig i noen minutter.
- Når du er ferdig, fjern minnekortet fra kortleseren og sett det inn i Raspberry Pi.
- Koble alle kabler (USB-strøm, Ethernet-kabel, USB-mottaker) til Raspberry Pi. I dette tilfellet, på Raspberry Pi, skal den røde LED-en være på og den grønne LED-en skal blinke, og nær Ethernet-nettverkskontakten - grønn og gul.
- Vent et par minutter til Raspberry Pi starter opp.
- Registrer en ny konto på FlightAware-nettstedet.
- Koble mottakeren til den opprettede kontoen.
- I mottakerinnstillingene ("My ADS-B"-fanen), rediger koordinatene for mottakerens plassering og antennehøyden over bakkenivå.
- Etter en stund skal mottakeren vises på dekningskartet https://www.adsbexchange.com/active-feeds/.
- Flyet som for øyeblikket spores av mottakerstasjonen din, kan sees ved å følge koblingen "Webgrensesnitt: vis live data" i fanen "My ADS-B" på FlightAware-nettstedet.
PROFITT!
Mottakeren din deltar nå i to flysporingsnettverk samtidig - ADSBexchange og, som en bonus, FlightAware. Distribuer denne instruksjonen, hjelp andre med å bygge mottaksstasjonene sine, og Shuvalovs hundefly vil ikke kunne skjule seg for det altseende øyet til sivilsamfunnet!
Med ferdighetene til å jobbe med mikrokontrollere, kan radaren lages uavhengig ved hjelp av mikrokretser, et sett med ledninger, en infrarød sensor og andre enheter. Du må også ha et diagram for videre montering.
Du vil trenge
- - ferdigheter i arbeid med radioteknikk og mikrokontrollere.
Bruksanvisning
Visste du ikke hvordan du skulle sette opp eller optimalisere radaren i CS GO? I denne tråden skal vi bare ta en titt på radarinnstillingene i CS Global Offensive. Hva trengs for å sette opp en radar? Alt gjøres veldig enkelt, du trenger ikke laste ned noen ekstra programvare, alt du trenger er:
Slår på konsollen
Hvis du har problemer med å åpne konsollen, følg instruksjonene nedenfor:
- Start CS: GO;
- Innstillinger → Spillinnstillinger;
- Aktiver utviklerkonsoll -> Ja;
- Innstillinger → Tastatur / mus;
- Rull til bunnen og se "Åpne konsoll" slår seg på " ` "- du kan stille inn hvilken som helst av nøklene dine.
Nå kan du begynne å sette opp!
Sette opp radaren
Det første jeg vil anbefale deg er å lage et spill med roboter slik at de ikke kan drepe deg og, allerede i spillet, ta seg av å sette opp radaren. La oss begynne:
Aktivere / deaktivere radar
Til Slå på radar, du må skrive drawradar-kommandoen i konsollen;
Til gjemme seg radar, hideradar-konsollkommandoen brukes;
cl_hud_radar_scale
Denne kommandoen er ansvarlig for størrelsen på radaren på skjermen.
 |
|
| cl_hud_radar_scale "0.8" | cl_hud_radar_scale "1.3" |
| Minimum: "0.8" // Maksimum: "1.3" | |
cl_radar_alltid_sentrert
Spilleren er alltid i midten av radaren. Ved første øyekast kan det se ut til at det ikke er så stor forskjell, men plusset er åpenbart - når du er i hjørnet av kartet - har du større utsikt over terrenget på radaren enn om du var i midten av kartet. radar.
 |
 |
| cl_radar_always_centered "0" | cl_radar_always_centered "1" |
| Det er to variabler tilgjengelig for valg, enten 0 eller 1 | |
cl_radar_icon_scale_min
Denne kommandoen endrer størrelsen på de forskjellige ikonene på radaren.
| cl_radar_icon_scale_min "0.4" | cl_radar_icon_scale_min "1.0" |
| Minimum: "0.4" // Maksimum: "1.0" | |
cl_radar_rotate
Slår radarrotasjonen av og på. De. hvis deaktivert, vil kartet på radaren alltid være i samme posisjon.
 |
 |
| cl_radar_rotate "0" | cl_radar_rotate "1" |
| Kan settes til enten 0 eller 1 | |
cl_radar_scale
Vi endrer målestokken på kartet som vises på radaren.
 |
 |
| cl_radar_scale "0,25" | cl_radar_scale "1.0" |
| Minimum: "0.25" // Maksimum: "1.0" | |
cl_hud_bomb_under_radar
Denne kommandoen aktiverer eller deaktiverer visningen av bombeikonet når du bærer det, eller når du ikke har det.
Dynamisk radarendre størrelse
Det er tider når målestokken på kartet på radaren må økes eller omvendt, reduseres. Dette kan gjøres ved å bruke bindingen nedenfor:
Bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05"; // øk størrelsen på radarbindingen "KP_minus" "incrementvar cl_radar_scale 0.25 1.0 -0.05"; // redusere størrelsen på radaren
Denne bindingen tillater knappen + eller - dynamisk endre størrelsen på radaren når du trykker. Knappene kan være hvilke som helst etter eget skjønn.
Radar standardinnstillinger
cl_hud_radar_scale "1"; cl_radar_always_centered "1"; cl_radar_icon_scale_min "0.6"; cl_radar_rotate "1"; cl_radar_scale "0.7"; cl_hud_bomb_under_radar "1";Ideen om å lage en slags radar for å bestemme avstanden kom til en av elevene mine. Vi fortsatte å utvikle den og bestemte oss for å introdusere den i kursprogrammet som et av prosjektene.
Etter et par uker med forberedelser fant vi endelig ut hvordan vi skulle starte det og hva vi måtte gjøre. Prosjektet trengte ikke være veldig avansert; vi setter vanskelighetsgraden til middels. Nedenfor er et eksempel på bruk av en personlig smal rekkevidde radar. Han skulle se litt morsom ut, så du kan le!
Beskrivelse og formål med prosjektet
Målet med prosjektet var å lage en fungerende radar. Systemet trenger kun å måle avstanden i en vinkel på 90 grader, som vist i eksempelet ovenfor. Avhengig av valgt sensor, fungerer systemet innenfor 4-30 cm, 20-150 cm og 1-5,5 m.
Resultatene av prosjektet vil påvirke videre utvikling der vi vil prøve å integrere radar for navigering av mobile roboter in vivo.
Elektroniske deler
- Spenningsstabilisator LM7805 5 V
- Mikrokontroller PIC18F452
- IR-sensor GP2D120
- Kvartsresonator på 4 eller 8 MHz
- Bytte om
- Kondensator
- 30-pinners kontakt
- 5 utløsere 74LS373
- Brødbord
- Lodd
- 36 indikatorer
- Ledning 30 AWG
- Trådverktøy
- Loddebolt
Detaljert liste over reservedeler
Du vet kanskje ikke alt om detaljene ovenfor, så et bilde av hver detalj er inkludert for å avklare dem. Det var tre nye objekter som ikke tidligere var spesifisert i prosjektet: et servosystem og IR-sensorer. Beskrivelse av IR-sensorer vises snart; Når det gjelder 74HCT373, vil en kort oversikt presenteres nedenfor. Du kan alltid sjekke brikkespesifikasjonene ved å søke etter "74HCT373".

En åtte-bits mikrokrets som inneholder en tre-stabil trigger. Enkelt sagt er denne brikken i stand til å lagre 8 biter med digital logikk og holde den i minnet til den blir slettet eller endret gjennom LE-Latch Enable-pinnen.
Arbeidsprinsipper
- LE og OE kontrollpinner
- 8 Datainngang D0-D7
- 8 Datautgang D0-D7
Strøm (Vcc og GND.)
Utgangsaktivering (OE) lar Q0-Q7 sende ut dataene som for øyeblikket er i D flip-flops.
Triggeraktivering (LE) gjør at dataene i D0-D7 kan overskrives til D-flip-flop.
Skjemaoversikt
Ordningen for dette prosjektet er mye mer komplisert enn de forrige. Det er 4 hovedfordeler med utviklingen vår.
- Vi vil kunne programmere bilder fra det fremkalte brettet.
- Vi skal kontrollere servosystemet.
- Vi tar data fra IR-avstandssensoren.
- Vi vil installere 36 LEB-indikatorer for å vise datautgangen fra IR-sensoren.
Kretsegenskaper
Ernæring
- Strøm leveres gjennom et 9V batteri koblet til LM7805 med en 1uF kondensator koblet til pinne/jord for å gi uavbrutt likestrøm til LM7805.
- Programsyklus
- Programmering gjøres ved å koble to kontakter fra kontrolleren til programmereren, noe som gir den første kontakten på programmereren tilgang til MCLR * / Vpp-Pin1 på kontrolleren. Av sikkerhetsmessige årsaker monteres en likeretterdiode.
- IR avstandssensor
- IR-sensoren bruker én kontrollerkontakt PIN 2 - RA0. De analoge egenskapene til denne utgangen brukes til å oppnå ADC-verdien, siden kun det analoge signalet hentes fra IR-sensoren. Denne verdien forteller deg om det er noe innenfor sensorens rekkevidde.
LED indikasjon
Det er totalt 40 LED-indikatorer. Hver 74HCT373-brikke kontrollerer opptil 8 indikatorer; siden 40/8 = 5, trenger vi 5 74HCT373-kretser for å drive alle 40 indikatorene. Det skal bemerkes i diagrammet at en databuss brukes for alle 5 brikkene.
Teori
Denne utviklingen bruker tre hovedinstrumenter for å lage en personlig radar. IR-sensoren kobles til mikrokontrolleren og vises deretter på indikatorsegmentet. En visuell demonstrasjon av denne prosessen er gitt:
Bruker forskjellige sensorer
Et viktig aspekt ved nøyaktigheten til IR-sensorene som brukes i dette prosjektet er at de har samme spenningsegenskaper, så dette programmet er kompatibelt med alle indikatorer. Det eneste du trenger å vite er hvordan sensoren brukes til å bestemme avstanden som vises på indikatorene.
Bruk
Så la oss ta en titt på det endelige utseendet til enheten:

Dette er utseendet til den sammensatte enheten. La oss gå videre til neste seksjon og fortsette å montere enheten.
Plastkassen nederst på bildet var ikke nevnt i delelisten. Dette er en vanlig sak som kan kjøpes fra enhver elektronikkprodusent eller forhandler. Først av alt må du bore 36 hull for indikatorene i kretsen og fikse indikatorene i dem. Et festemiddel ble brukt før indikatorene ble satt inn i hullene.

Etter at panelet er loddet, begynner vi å koble til kretsen. Hver ledning må kobles gjennom et lite hull i kassen.

Figuren over viser en tidlig visning av panelet. I begynnelsen av tilkoblingen av ledningene er det en akkumulering av et stort antall av dem, for eksempel slik:


Siste touch i utviklingen av en personlig radar er muligheten til å bruke den online. Ledningene er 2-4 meter lange ved tilkobling av servosystemet og IR-sensoren. Vi lager et hull i fronten av saken for disse ledningene:
Etter å ha fullført monteringen, la oss gå videre til programvaredelen av utviklingen. Dette er langt på vei en mer subtil utviklingsdel enn til og med kabling.
Programvaren for dette instrumentet består av tre hoveddeler:
- Servokontroll
- LED indikasjonskontroll
- input A / D /
Siden all programvaren for dette prosjektet ikke får plass på én side, vil det bli forklart hva disse delene er og hvordan de fungerer.
Servokontroll
Servosystemet styres av timere og avbrudd. To separate avbrudd, trigget samtidig for å skape ønsket lyd, genererer et 50 GHz-signal og servopekeren beveger seg i små trinn for å justere knirkelyden.
Regulering av LED indikasjon.
Indikatorene styres av 74LS373 / 74HCT373 triggere. Systemet oppdaterer konstant triggerdataene som vises på indikatorene.
A / C-inngang
IR-sensoren gir analog utgang. En omformer brukes til å bestemme spenningsverdien, noe som indikerer at objektet har beveget seg utenfor rekkevidden til IR-sensoren.

Monteringen og konfigurasjonen av enheten er fullført - du må teste den. Avhengig av sensoren du bruker, vil indikasjonen være forskjellig. Valgbare sensorer GP2D120, GP2Y0A21YK og GP2Y0A700K0F.
Data og observasjoner
Den første testen av radaren vil være en test på nært hold. Blikkbokser ble brukt som hindringer.
På den andre videoen (på første side) testes indikatorer på 20 cm - 150 cm og 1 m - 5,5 m, noe som gjør det mulig å overvinne mer alvorlige hindringer. Ta en titt for å se hva dette handler om.
To videoer vil demonstrere driften av sensoren, men med selvmontering er det mulig med små vanskeligheter, som vil bli beskrevet i konklusjonen.
O personlig radaroversikt
Det tar litt tid å sette sammen og konfigurere denne enheten. Dette er et prosjekt du kan gjøre på en dag, og det har allerede en nisje i søknaden, men over tid vil det oppstå ytterligere vanskeligheter. IR-sensorer kan bli upålitelige, og utgangsresultatene kan være små på grunn av miljø- og miljøpåvirkning.
Handlinger som skal iverksettes
For å øke sensorens dekningsradius er det planlagt å bruke ultralydsensorer, som tilsvarer de ovenfor beskrevne "lydsensorene", som overfører data om avstanden fra deg til objektet. Ultralyd har et bredere spekter enn infrarødt og er mer pålitelig i tøffe miljøer.
Konklusjon
Prosjektet var en morsom utforskning av infrarøde sensorer. Det viser at resultater kan oppnås og brukes realistisk. Mange ytterligere prosjekter kan utvikles basert på dette.
Hvordan få en stor radar i cs til å gå for å se hele kartet?
Hvis du spiller med standard radarinnstillinger, vil du ikke kunne se hele kartet. Erfarne spillere holder konstant radaren i sikte (selvfølgelig, ikke bokstavelig talt, men du skjønner ideen). Dette er nødvendig for å forstå hvor både spillerens lagmedlemmer og motstanderne er (eller i det minste hvor motstanderne nylig var).
Fiender er indikert med røde prikker på radaren. I løpet av få sekunder etter at motstanderen forsvant fra synsfeltet, vises et rødt spørsmålstegn på radaren.
Slik slår du på radaren i cs go - drawradar
Slik slår du av radaren i cs go - hideradar
cl_radar_icon_scale_min 0,6 - størrelsen på ikonene på radaren (område: 0 til 1)
cl_radar_scale 0,4 - kartskala (område: fra 0,2 - 1)
cl_radar_always_centered 0 - forskyvning av midten av radaren mot kartets synlighet, 1 - du er midten av radaren
cl_radar_rotate 1 - aktiver kartrotasjon, 0 - deaktiver
cl_hud_radar_scale 1 - radarstørrelse (område: 0,8 til 1,3)
hud_scaling 0,95 - grensesnittstørrelse (0,95 til 0,5)
drawradar - slår på radaren
Hvis du igjen vil slå av radaren i cs go, så skriv denne kommandoen i konsollen:
hideradar - slår av radaren
Hvordan sette opp en radar i CS: GO ved hjelp av konsollkommandoer?
Jeg brukte ofte radarvisningen av kartet.
For eksempel, hvis jeg er på punkt A, og teammedlemmene mine skyndte seg til punkt B, og jeg ikke har tid til å finne ut av chatten, vil dette være godt synlig på radaren. I tillegg, hvis noen fra teamet ditt oppdager en terrorist med en bombe, vil den vises på radaren.
Dette skjermbildet viser hva vi ønsker å oppnå:
- En radar der spilleren alltid er i sentrum.
- En radar der hele kartet er synlig.
- Forstørret radar (zoomet inn).
- Større ikoner. Dette vil gjøre det lettere for deg å oppdage lagmedlemmer/fiender (valgfritt).
- Minicap (generelt).
La oss nå gå videre til innstillingene. Du må legge dem til filen din kalt config (også kalt autoexec). Vi vil gå over hver innstilling i rekkefølge. På denne måten vil du vite hva den er ansvarlig for, og du kan tilpasse radaren etter dine preferanser.
Hvis du bare trenger innstillinger, kan du bla gjennom siden. De er gitt helt på slutten av artikkelen.
For det første trenger vi ikke en radar som alltid vil være sentrert, siden i dette tilfellet går mye skjermplass tapt når den er nær grensen til kartet.
For å gjøre dette, endre parameteren i den tilsvarende linjen til "0":
cl_radar_always_centered "0"

Se? Nesten halvparten av plassen er okkupert av det svarte området. Hvis radaren ikke alltid er sentrert, vil vi kunne se store områder av kartet.
Det neste vi må gjøre er å zoome ut på kartet. På denne måten kan vi se enda mer.
Still inn følgende parameterverdi:
cl_radar_scale "0.3"

Før det kunne vi ikke se hele kartet. Etter å ha endret innstillingene, vises alle områder av kartet konstant på radaren. Dette er veldig nyttig ved respawning, når du ikke vet hvor teammedlemmene dine er – du kan alltid se dem.
Skript for å øke størrelsen på radaren (Zoom-skript)
Vi har kommet opp med et lite script som lar deg øke/minske størrelsen på radaren, dette kan gjøres ved å trykke "+" eller "-".
I konfigurasjons- eller autoexec-filen, spesifiser følgende:
// Skaler radaren
bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05";
bind "KP_minus" "incrementvar cl_radar_scale 0.25 1.0 -0.05";
Når du reduserer størrelsen på radaren, kan noen detaljer bli oversett. For å kompensere for denne ulempen kan vi zoome inn på radaren.
For å gjøre dette, må du bruke kommandoen:
cl_hud_radar_scale «1.15»

Som du ser har omfanget økt. Jeg regnet ut at 1,15 er det optimale forholdet, som lar deg skille detaljer uten problemer, men samtidig tar ikke radarbildet opp mye skjermplass. Du kan eksperimentere med andre verdier.
Dette trinnet er valgfritt, men jeg brukte det. Det øker størrelsen på ikonene som vises på radaren, noe som også kan være nyttig.
cl_radar_icon_scale_min «1»

Endelig radarinnstillinger i CS GO
Nå kan vi evaluere de endrede innstillingene til radaren, der hele kartet er konstant synlig. Sammenlign dem med standardparametrene:

Det ble veldig kult.
Den eneste ulempen med de nye innstillingene er det lave detaljnivået på kartet, men når størrelsen på radaren økes, blir detaljene lettere å skille. Men hvis du kjenner kartet godt, vil ikke dette gjøre livet ditt mye vanskeligere.
Optimaliserte radarinnstillinger (standardinnstillinger)
cl_radar_always_centered “0” (“1”)
cl_radar_scale "0.3" ("0.7")
cl_hud_radar_scale “1.15” (“1”)
cl_radar_icon_scale_min “1” (“0.6”)
To parametere forble uendret:
cl_radar_rotate "1"
cl_radar_square_with_scoreboard "1"