Föreläsning om mobila enheters anatomiV. Navigering (GPS, GLONASS, etc.) i smartphones och surfplattor. Källor till fel. Testmetoder.
Fram till nyligen var det möjligt att köpa enheter som kallas "Navigatorer" i detaljhandelskedjor. Huvudfunktionen hos dessa enheter motsvarade helt deras namn, och de utförde det vanligtvis bra.
På den tiden var praktiskt taget det enda normalt fungerande navigationssystemet i världen det amerikanska GPS-systemet (Global Positioning System), och det räckte för alla behov. Egentligen var orden "navigation" (navigator) och GPS synonyma på den tiden.
Allt förändrades när tillverkare av handdatorer (handdatorer), och sedan smartphones och surfplattor, började bygga in navigeringsstöd i sina enheter. Fysiskt implementerades det i form av inbyggda mottagare av navigationssignaler. Ibland kunde navigeringsstöd hittas även i telefoner med tryckknappar.
Från det ögonblicket förändrades allt. Navigatorer, som separata enheter, har nästan försvunnit från både produktion och försäljning. Konsumenter har gått över till att använda smartphones och surfplattor som navigatorer.
Under tiden togs ytterligare två navigationssystem framgångsrikt i drift - det ryska GLONASS och det kinesiska Beidou (Beidou, BDS).
Men det betyder inte att kvaliteten på navigeringen har förbättrats. Navigationsfunktionen i dessa enheter (smartphones och surfplattor) har inte längre blivit den huvudsakliga, utan en av många.
Som ett resultat började många användare märka att inte alla smartphones är "lika användbara" för navigeringsändamål.
Det är här vi kommer till problemet med att identifiera källorna till fel i navigering, inklusive frågan om vilken roll enhetstillverkarna spelar i denna fråga. Tråkigt men sant.
Men innan vi skyller på tillverkarna för alla deras synder, låt oss först titta på källorna till fel i navigeringen. För producenter, som vi kommer att få reda på senare, är inte skyldiga till alla synder, utan bara för hälften. :)
Navigationsfel kan delas in i två huvudklasser: orsakade av orsaker utanför navigationsenheten, och interna.
Låt oss börja med yttre skäl. De uppstår främst på grund av ojämnheten i atmosfären och det naturliga tekniska felet hos mätinstrument.
Deras ungefärliga bidrag är:
Signalbrytning i jonosfären ± 5 meter;
- Satellitomloppsfluktuationer ± 2,5 meter;
- Satellitklockfel ± 2 meter;
- Troposfäriska ojämnheter ± 0,5 meter;
- Inverkan av reflektioner från föremål± 1 meter;
- Mätfel i mottagaren ± 1 meter.
Dessa fel har ett slumpmässigt tecken och riktning, så det slutliga felet beräknas i enlighet med sannolikhetsteorin som roten till kvadratsumman och är 6,12 meter. Det betyder inte att felet alltid kommer att vara så här. Det beror på antalet synliga satelliter, deras relativa position och framför allt på nivån av reflektioner från omgivande föremål och påverkan av hinder på försvagningen av satellitsignaler. Som ett resultat kan felet vara antingen högre eller lägre än det angivna "genomsnittliga" värdet.
Signaler från satelliter kan till exempel försvagas i följande fall:
- när du är inomhus;
- när de är placerade mellan högt placerade objekt (mellan höghus, i en smal bergsravin, etc.);
- i skogen. Erfarenheten visar att tät, hög skog kan göra navigeringen betydligt svårare.
Dessa problem beror på att högfrekventa radiosignaler färdas som ljus - det vill säga bara inom en siktlinje.
Ibland kan navigering, om än med fel, också fungera på signaler som reflekteras från hinder; men när de reflekteras upprepade gånger blir de så svaga att navigeringen slutar fungera med dem.
Låt oss nu gå vidare till de "interna" orsakerna till fel i navigering; de där. som skapas av själva smartphonen eller surfplattan.
Egentligen finns det bara två problem här. För det första, dålig känslighet för navigationsmottagaren (eller problem med antennen); för det andra, den "snetta" programvaran på en smartphone eller surfplatta.
Innan vi tittar på specifika exempel, låt oss prata om sätt att kontrollera kvaliteten på navigeringen.
Navigationstestmetoder.
1. Testa navigering i "statiskt" läge (med smartphone/surfplatta i stillastående position).
Denna kontroll låter dig bestämma följande parametrar:
- hastighet för initial bestämning av koordinater under en "kallstart" (mätt av klockan);
- en lista över navigationssystem som denna smartphone/surfplatta fungerar med (GPS, GLONASS, etc.);
- uppskattad noggrannhet för koordinatbestämning;
- hastighet för att bestämma koordinater under en "varmstart".
Dessa parametrar kan bestämmas med både vanliga navigationsprogram och speciella testprogram (vilket är bekvämare).
Reglerna för statisk testning är mycket enkla: testning måste göras i öppen plats(bred gata, torg, åker etc.) och när internet är avstängt. Om det sista kravet överträds kan "kallstartstiden" påskyndas avsevärt på grund av direkt nedladdning av satellitbanor från Internet (A-GPS, assisterad GPS) istället för att bestämma dem från signaler från själva satelliterna; men det kommer inte längre att vara "rättvist", eftersom detta inte längre kommer att vara själva navigationssystemets rena verk.
Låt oss titta på ett exempel på hur AndroiTS navigationstestprogram fungerar (det finns analoger):

(Klicka för att förstora)
Bilden som just presenterades visar att smarttelefonen fungerar med tre navigationssystem: amerikansk GPS, ryska GLONASS och kinesiska Beidou (BDS).
Längst ner på skärmdumpen kan du se de framgångsrikt bestämda koordinaterna för den aktuella platsen. Värdet på en latitud är ungefär 100 km, därför är priset för en enhet av den lägsta rangen 10 cm.
Värdet på en grad i longitud är olika för olika geografiska platser. Vid ekvatorn är det också cirka 100 km, och nära polerna minskar det till 0 (vid polerna kommer meridianerna närmare varandra).
Till höger om kolumnen som anger satelliternas nationalitet finns en kolumn med satellitnummer. Dessa nummer är strikt knutna till dem och ändras inte.
Därefter kommer kolumner med färgade staplar. Storleken på staplarna anger signalnivån och färgen anger om navigationssystemet använder dem eller inte. Oanvända satelliter indikeras med grå staplar. Färgen på de som används beror på deras signalnivå.
Nästa kolumn är också signalnivån från navigationssatelliter, men i siffror ("konventionella enheter").
Sedan finns det en kolumn med gröna bockar och röda streck - detta är en upprepning av information om huruvida satelliten används eller inte.
På den översta raden indikerar ordet "ON" statusen för navigeringstillståndet; i det här fallet betyder det att bestämning av koordinater är tillåten i smarttelefonens inställningar och de bestäms. Om statusen är "VÄNTA" är bestämning av koordinater tillåten, men det erforderliga antalet satelliter har ännu inte hittats. Statusen "AV" betyder att koordinatbestämning är förbjuden i smarttelefonens inställningar.
Sedan indikerar en cirkel med koncentriska cirklar och siffran 5 den uppskattade noggrannheten för att bestämma koordinaterna för tillfället - 5 m. Detta värde beräknas baserat på antalet och "kvaliteten" av satelliter som används och förutsätter att behandlingen av data från satelliter i smarttelefonen görs utan fel; men, som vi kommer att se senare, är detta inte alltid fallet.
När satelliterna rör sig bör alla dessa data ändras, men koordinaterna (på den nedersta raden) bör ändras något.
Tyvärr visar den här applikationen inte den tid som ägnas åt den initiala bestämning av koordinater ("kallstart"), och inte heller andra liknande applikationer. Denna tid måste "tidsställas" manuellt. Om "kallstartstiden" var mindre än en minut, är detta ett utmärkt resultat; upp till 5 minuter – bra; upp till 15 minuter – i genomsnitt; mer än 15 minuter – dåligt.
För att bestämma "varmstart"-hastigheten, avsluta bara testprogrammet och logga in igen efter några minuter. Som regel, under lanseringen av testprogrammet, lyckas det fastställa koordinaterna och omedelbart presentera dem för användaren. Om fördröjningen i att presentera koordinater under en "varmstart" överstiger 10 sekunder, är detta redan misstänkt långt.
Effekten av att snabbt bestämma koordinater under en "varmstart" beror på att navigationssystemet kommer ihåg de senast beräknade satellitbanorna och inte behöver bestämma dem igen.
Så vi har sorterat testnavigering i "statiskt" läge.
Låt oss gå vidare till 2:a punkten för att testa navigering - i rörelse.
Huvudsyftet med navigering är att leda oss till rätt plats medan vi rör oss, och utan att testa när vi rör oss skulle testet vara ofullständigt.
I rörelseprocessen, ur navigationssynpunkt, finns det tre typer av terräng: öppen terräng, tätorter och skog.
Öppna områden är idealiska navigeringsförhållanden.
Stadsutveckling kännetecknas i de flesta fall av närvaron av en hög nivå av reflektioner och en liten minskning av signalnivån.
Skogen "fungerar" tvärtom – en betydande försvagning av signalen och en låg nivå av reflektioner.
Låt oss först titta på ett exempel på ett nästan "idealiskt" spår:

Bilden visar två spår: dit/tillbaka (så kommer det fortsätta vara fallet på nästan alla bilder). Sådana bilder tillåter oss att göra en tillförlitlig slutsats om kvaliteten på navigeringen, eftersom vi kan jämföra två nästan identiska spår med varandra och med vägen. Allt är bra på den här bilden - spårvibrationerna är inom gränserna för naturliga fel. I den övre delen är passagen på olika sidor av rondellen tillräckligt utdragen. På vissa ställen finns en märkbar avvikelse mellan spåren, troligen orsakad av signalreflektioner från vattenytan och från metallkonstruktionerna på bron över ån. Och i vissa - en nästan perfekt slump.
Låt oss nu titta på flera typiska fall av "problem"-spår.
Låt oss titta på GPS-spåret för en smartphone, som påverkades av en minskning av signalnivån i en hög skog:

Spårens divergens från varandra och från vägen är märkbar, men långt ifrån katastrofal. I det här fallet minskade noggrannheten för smartphonenavigering inom gränserna för "naturlig nedgång" för sådana förhållanden. En sådan smartphone måste anses lämplig för navigeringsändamål.

På höger sida av skärmdumpen är avvikelserna mellan spåren och vägen tydligt synliga. Sådana avvikelser i villkoren för en sådan "välformad" utveckling är nästan oundvikliga, och i det här fallet indikerar de inte på något sätt mot den smarttelefon som testas.
Teoretiskt sett gäller att ju fler navigationssystem en smartphone (surfplatta) stöder, desto fler satelliter använder den för navigering och desto mindre bör felet vara.
I praktiken är det inte alltid så. Ganska ofta, på grund av sned programvara, kan en smartphone inte korrekt ansluta data från olika system och som ett resultat uppstår onormala fel. Låt oss titta på några exempel.
Ta till exempel det här spåret:

Skärmdumpen som just visas visar en nålformad utkastning, som inte kunde vara resultatet av någon störning: stigen gick genom ett låghus utan täta skogsplanteringar. Den här utgåvan är helt och hållet på samvetet om den "snetta" programvaran.
Men dessa var fortfarande "blommor". Det finns smartphones där onormala navigeringsfel inte längre är blommor, utan bär:

Vid inspelning av detta spår kombinerades avvikande fel i den "snetta" mjukvaran med försvagning av signalerna i högskogen. Resultatet är ett spår från vilket det helt enkelt är omöjligt att gissa att stigen dit och tillbaka togs längs samma väg av en nykter person. :)
Och den tjocka massan av linjer längst upp är "vägen" för en orörlig smartphone under ett vilostopp. :)
Det finns en annan typ av avvikande fel associerat med en paus i dataflödet som kommer från navigationsmottagaren till datordelen av smarttelefonen:

Den här bilden visar att en del av stigen (ca 300 m) passerade i en rak linje, och delvis direkt genom vattnet. :)
I det här fallet kopplade smarttelefonen helt enkelt ihop punkterna där koordinatströmmen försvann och dök upp med en rak linje. Deras förlust kan vara associerad antingen med en minskning av antalet synliga satelliter under ett kritiskt antal, eller med "snett" mjukvara och till och med hårdvaruproblem (även om det senare är osannolikt).
I händelse av en fullständig förlust av signaler från satelliter, kopplar navigationsprogram vanligtvis inte samman punkterna för förlust och utseende med raka linjer, utan lämnar helt enkelt ett "tomt utrymme" (detta resulterar i en lucka i spåret):

Den här bilden visar ett avbrott i spåret på den plats där en del av banan passerade genom en underjordisk passage med en fullständig förlust av sikt för alla satelliter.
Efter att ha studerat orsakerna och typiska navigeringsfel är det dags dra slutsatser.
Den bästa navigeringen, som du kan förvänta dig, finns i smartphones och surfplattor av "höga" märken. Problem i form av avvikande fel har ännu inte upptäckts med dem. Och, naturligtvis, ju fler navigationssystem en enhet stöder, desto bättre. Det är sant att stödet för den kinesiska Beidou fortfarande är vettigt när du använder enheten i regioner och länder som ligger nära Middle Kingdom. Det kinesiska navigationssystemet är inte globalt, utan "lokalt" (för nu). Så stöd för GPS och GLONASS kommer att räcka.
Om en smartphone eller surfplatta inte är av särskilt "känd" ursprung, kan det finnas problem med navigeringen eller inte. Innan du använder den i strid rekommenderas det att testa den både statiskt och i rörelse i olika miljöer, så att den senare inte ger någon obehaglig överraskning. I de flesta fall orsakar mobila enheter endast med GPS färre problem, även om deras noggrannhet är lägre än för enheter med flera system.
Tyvärr, när du väljer en smartphone (surfplatta) med bra navigering, är det ganska svårt att navigera genom recensioner av enheter på Internet. Det överväldigande antalet IT-portaler ignorerar kontroll av navigering på resande fot och under svåra förhållanden. Denna kontroll görs endast på den här portalen () och bokstavligen på ett par andra.
Till sist Det måste sägas att inte bara smartphones och surfplattor, utan även många andra enheter nu är utrustade med navigeringshjälpmedel. De installeras till exempel i kameror, videokameror, GPS-spårare, bilvideobandspelare, smarta klockor, vissa specialiserade typer av enheter och till och med i det elektroniska skattesystemet för förare av ryska tunga lastbilar "Platon".
Din läkare.
20.01.2017
Satellitpositionering och navigeringssystem, som ursprungligen utvecklades för militära behov, har nyligen fått bred tillämpning inom den civila sfären. GPS/GLONASS-övervakning av transporter, övervakning av människor i behov av vård, övervakning av anställdas rörelser, spårning av djur, spårning av bagage, geodesi och kartografi är de huvudsakliga användningsområdena för satellitteknik.
För närvarande finns det två globala satellitpositioneringssystem skapade i USA och Ryska federationen, och två regionala, som täcker Kina, länderna i Europeiska unionen och ett antal andra länder i Europa och Asien. GLONASS-övervakning och GPS-övervakning är tillgängliga i Ryssland.
GPS- och GLONASS-system
GPS (Global Position System) är ett satellitsystem vars utveckling började i Amerika 1977. 1993 var programmet utplacerat och i juli 1995 var systemet helt klart. För närvarande består GPS-rymdnätverket av 32 satelliter: 24 huvudsakliga, 6 backup. De kretsar runt jorden i en medelhög bana (20 180 km) i sex plan, med fyra huvudsatelliter i varje.
På marken finns en huvudkontrollstation och tio spårningsstationer, varav tre överför korrigeringsdata till den senaste generationens satelliter, som distribuerar dem till hela nätet.
Utvecklingen av GLONASS-systemet (Global Navigation Satellite System) började i Sovjetunionen 1982. Slutförandet av arbetet tillkännagavs i december 2015. GLONASS kräver 24 satelliter för att fungera, 18 är tillräckligt för att täcka territoriet och Ryska federationen, och det totala antalet satelliter som för närvarande är i omloppsbana (inklusive backuper) är 27. De rör sig också i en medelhög omloppsbana, men på en lägre höjd (19 140 km), i tre plan, med åtta huvudsatelliter i varje.
GLONASS markstationer finns i Ryssland (14), Antarktis och Brasilien (en vardera), och ytterligare ett antal stationer planeras att sättas in.
Föregångaren till GPS var Transit-systemet, utvecklat 1964 för att styra uppskjutningen av missiler från ubåtar. Den kunde lokalisera uteslutande stationära föremål med en noggrannhet på 50 m, och den enda satelliten var endast synlig i en timme om dagen. GPS-programmet hette tidigare DNSS och NAVSTAR. I Sovjetunionen började skapandet av ett satellitnavigeringssystem 1967 som en del av Cyclone-programmet.
De viktigaste skillnaderna mellan GLONASS och GPS-övervakningssystem:
- Amerikanska satelliter rör sig synkront med jorden, medan ryska satelliter rör sig asynkront;
- olika höjder och antal banor;
- deras olika lutningsvinklar (ca 55° för GPS, 64,8° för GLONASS);
- olika signalformat och driftsfrekvenser.
- GPS är det äldsta befintliga positioneringssystemet, det var fullt fungerande före det ryska.
- Tillförlitlighet kommer från att använda ett större antal redundanta satelliter.
- Positionering sker med ett mindre fel än GLONASS (i genomsnitt 4 m, och för den senaste generationens satelliter - 60–90 cm).
- Många enheter stöder systemet.
Fördelar med GPS

Fördelar med GLONASS-systemet
- Positionen för asynkrona satelliter i omloppsbana är mer stabil, vilket gör dem lättare att kontrollera. Regelbundna justeringar krävs inte. Denna fördel är viktig för specialister, inte konsumenter.
- Systemet skapades i Ryssland, därför säkerställer det tillförlitlig signalmottagning och positioneringsnoggrannhet på nordliga breddgrader. Detta uppnås på grund av den större lutningsvinkeln för satellitbanor.
- GLONASS är ett inhemskt system och kommer att förbli tillgängligt för ryssar om GPS stängs av.
- Satelliter roterar synkront med jordens rotation, så noggrann positionering kräver drift av korrigerande stationer.
- En låg lutningsvinkel ger inte en bra signal och exakt positionering i polära områden och höga breddgrader.
- Rätten att kontrollera systemet tillhör militären och de kan förvränga signalen eller helt inaktivera GPS för civila eller för andra länder i händelse av en konflikt med dem. Därför, även om GPS för transport är mer exakt och bekvämare, är GLONASS mer pålitlig.
- Utvecklingen av systemet började senare och genomfördes tills nyligen med en betydande eftersläpning efter amerikanerna (kris, ekonomiskt missbruk, stöld).
- Ofullständig uppsättning satelliter. Livslängden för ryska satelliter är kortare än den för amerikanska satelliter, de kräver reparation oftare, så noggrannheten för navigering i ett antal områden minskar.
- GLONASS satellit fordonsövervakning är dyrare än GPS på grund av de höga kostnaderna för enheter anpassade för att fungera med det inhemska positioneringssystemet.
- Brist på mjukvara för smartphones och handdatorer. GLONASS-moduler designades för navigatorer. För kompakta bärbara enheter idag är det vanligare och mer prisvärda alternativet stöd för GPS-GLONASS eller endast GPS.
Nackdelar med GPS-systemet
Nackdelar med GLONASS-systemet

Sammanfattning
GPS- och GLONASS-systemen kompletterar varandra. Den optimala lösningen är satellit GPS-GLONASS-övervakning. Enheter med två system, till exempel GPS-markörer med M-Plata GLONASS-modulen, ger hög positioneringsnoggrannhet och tillförlitlig drift. Om för positionering uteslutande med GLONASS är felet i genomsnitt 6 m och för GPS - 4 m, då minskar det till 1,5 m när man använder två mikrochips. Men sådana enheter med två mikrochips är dyrare.
GLONASS utvecklades specifikt för ryska breddgrader och är potentiellt kapabel att ge hög noggrannhet på grund av dess underbemanning med satelliter, den verkliga fördelen är fortfarande på sidan av GPS. Fördelarna med det amerikanska systemet är tillgängligheten och det breda urvalet av GPS-aktiverade enheter.
Syfte
GPS (Global Positioning System) låter dig exakt bestämma de tredimensionella koordinaterna för ett objekt som är utrustat med en GPS-mottagare: latitud, longitud, höjd över havet, såväl som dess hastighet, rörelseriktning och aktuell tid.
Kort historia
GPS-systemet har utvecklats av det amerikanska försvarsdepartementet. Arbetet med detta projekt, kallat NAVSTAR (NAVigation System with Timing and Ranging - navigationssystem för att bestämma tid och räckvidd), började redan på 70-talet. Systemets första satellit lanserades i omloppsbana 1974, och den sista av de 24 behövde täcka hela jorden först 1993. Från början var GPS avsedd att användas av den amerikanska militären (navigering, missilvägledning, etc.). men sedan 1983, när det sköts ner. Ett flygplan från Korean Airlines trängde in i sovjetiskt territorium av misstag. Samtidigt förstorades noggrannheten hos den överförda signalen med en speciell algoritm, men år 2000 hävdes denna begränsning. Det amerikanska försvarsdepartementet fortsätter att underhålla och uppgradera GPS-systemet. Det var detta fullständiga beroende av systemets prestanda av regeringen i ett land (till exempel under det första Gulfkriget stängdes den civila sektorn av GPS av) som fick andra länder att utveckla alternativa navigationssystem (ryska - GLONASS, europeisk - GALILEO, kinesiska - Beidou).
Principer för att bestämma koordinater
Principen för att bestämma koordinaterna för ett objekt i GPS-systemet bygger på att beräkna avståndet från det till flera satelliter, vars exakta koordinater är kända. Information om avståndet till minst 3 satelliter låter dig bestämma koordinaterna för ett objekt som skärningspunkten för sfärer, vars centrum är satelliterna och radien är det uppmätta avståndet.
Faktum är att det finns två skärningspunkter mellan sfärerna, men en av dem kan kasseras pga det är antingen djupt inne i jorden eller mycket högt över dess yta. Avståndet till varje satellit definieras som den tid det tar för en radiosignal att färdas från satelliten till mottagaren multiplicerat med ljusets hastighet. Problemet uppstår med att exakt bestämma transittiden för en radiosignal. Det löses genom att generera och sända en signal från satelliten, modulerad med en speciell sekvens. Exakt samma signal genereras i GPS-mottagaren och analys av fördröjningen av den mottagna signalen från den interna signalen gör det möjligt att bestämma dess restid.

För att exakt bestämma signalens färdtid måste GPS-mottagarens och satellitens klockor synkroniseras så mycket som möjligt, en avvikelse på även några mikrosekunder leder till ett mätfel på tiotals kilometer. Satelliten har atomklockor med hög precision för dessa ändamål. Det är omöjligt att installera en liknande klocka i en GPS-mottagare (vanliga kvartsklockor används), så ytterligare signaler från minst en satellit till används för att synkronisera tiden. Det antas att om tiden i GPS-mottagaren är exakt synkroniserad, så kommer en cirkel med en radie lika med avståndet från den fjärde satelliten att skära samma punkt som cirklarna från de andra tre satelliterna. GPS-mottagaren justerar sin klocka tills detta villkor är uppfyllt. För att exakt bestämma positionen för ett objekt i tredimensionellt rymden (3D), krävs signaler från minst 4 satelliter (från 3 satelliter utan att bestämma höjden över jordens yta - 2D). I praktiken, med god sikt mot himlen, tar GPS-mottagare emot signaler från många satelliter samtidigt (upp till 10-12), vilket gör att de kan synkronisera klockor och bestämma koordinater med ganska hög noggrannhet.

Tillsammans med sekvensen genom vilken signalens utbredningstid bestäms, sänder varje satellit binär information - en almanacka och efemeri. Almanackan innehåller information om det aktuella tillståndet och den uppskattade omloppsbanan för alla satelliter (efter att ha fått information från en satellit blir det möjligt att begränsa söksektorerna för signaler från andra satelliter). Ephemeris - uppdaterad information om omloppsbanan för en specifik satellit som sänder en signal (satellitens faktiska omloppsbana kan skilja sig från den beräknade). Det är exakta data om satelliternas aktuella position som gör att GPS-mottagaren kan beräkna sin egen position i förhållande till dem.
GPS-noggrannhet
Den typiska noggrannheten för att bestämma koordinater av GPS-mottagare i horisontalplanet är cirka 1-2 meter (förutsatt god sikt mot himlen). Noggrannheten för att bestämma höjd över havet är vanligtvis 2-5 gånger lägre än noggrannheten för att bestämma koordinater under samma förhållanden (d.v.s. under idealiska förhållanden, 2-10 meter).
Nivån på signalmottagning från satelliter, och som ett resultat av noggrannheten för att bestämma koordinater, försämras under tätt löv av träd eller på grund av mycket tunga moln. Normal mottagning av GPS-signaler kan också försämras av störningar från många markbundna radiokällor. Den viktigaste faktorn som påverkar minskningen av GPS-noggrannhet är dock ofullständig synlighet av himlen. Detta är särskilt tydligt när GPS-mottagaren är placerad i täta stadsområden, när en betydande del av himlen döljs av närliggande byggnader, baldakiner och andra hinder. Noggrannheten för att bestämma koordinater kan sjunka till 20-30 meter, och ibland mer. Hinder tillåter inte signaler från vissa satelliter som potentiellt är tillgängliga vid en given punkt på jorden att passera igenom. Detta leder till det faktum att beräkningar utförs med ett mindre antal signaler från satelliter som huvudsakligen ligger i en himmelssektor. Förskjutningen sker vanligtvis i ett plan vinkelrätt mot hindret.

I allmänhet, om vi talar om noggrannheten hos GPS i stadsförhållanden, baserat på ackumulerade statistiska data och vår egen erfarenhet, kan vi dra följande slutsatser. Noggrannheten för att bestämma koordinater när fordonet står på ett öppet område (parkeringsplats, torg, etc.) och vid körning längs stora motorvägar och flerfiliga vägar kommer att vara 1-2 meter. När man kör längs smala gator, särskilt när det finns tätt belägna hus längs dem, blir noggrannheten 4-10 meter. När bilen står i ”gårdsbrunnar”, väldigt nära höghus osv. noggrannheten kan sjunka till 20-30 meter.
Naturligtvis beror noggrannheten för att bestämma koordinater mycket på kvaliteten på själva GPS-mottagaren, såväl som de använda antennerna och deras korrekta placering på fordonet
Sök föreläsningar
Vid godkännande av krav på noggrannhet och metoder för att bestämma koordinaterna för karakteristiska punkter för gränserna för en tomt, såväl som karakteristiska punkter för konturen av en byggnad, struktur eller föremål för oavslutad konstruktion på en tomt.
I enlighet med del 7 i artikel 38 och del 10 i artikel 41 i den federala lagen av den 24 juli 2007 nr 221-FZ "Om statens fastighetsregister" (Ryska federationens samlade lagstiftning, 2007,
nr 31, art. 4017; 2008, nr 30, art. 3597, art. 3616; 2009, nr 1, art. 19; nr 19, art. 2283; nr 29, art. 3582; nr 52, art. 6410, art. 6419) beställning:
godkänna de bifogade kraven för noggrannheten och metoderna för att bestämma koordinaterna för karakteristiska punkter för gränserna för en tomt, såväl som karakteristiska punkter för konturen av en byggnad, struktur eller oavslutad byggarbetsplats på en tomt.
Minister E.S. Nabiullina
Godkänd
på order av Rysslands ministerium för ekonomisk utveckling
från___________ Nej.__________
Krav på noggrannheten och metoderna för att bestämma koordinaterna för karakteristiska punkter för gränserna för en tomt, såväl som karakteristiska punkter för konturen av en byggnad, struktur eller föremål för oavslutad konstruktion på en tomt.
1. En karakteristisk punkt för en markgräns är den punkt där beskrivningen av markgränsen ändras och dess indelning i delar.
En karakteristisk punkt för konturen av en byggnad, struktur eller ett ofärdigt byggobjekt på en tomt är den punkt där gränsen för konturen av en byggnad, struktur eller ett ofärdigt byggobjekt ändrar riktning.
2. Platsen på marken för karakteristiska punkter på gränsen till en tomt beskrivs av deras platta rektangulära koordinater i Gauss-Kruger-projektionen, beräknade i det koordinatsystem som antagits för att upprätthålla den statliga fastighetsregistret.
Placeringen av en byggnad, struktur eller föremål av oavslutad konstruktion på en tomt fastställs genom att bestämma platta rektangulära koordinater i Gauss-Kruger-projektionen av karakteristiska punkter på konturen av en sådan byggnad, struktur eller föremål med ofullbordad konstruktion i koordinatsystemet antagen för att upprätthålla statens fastighetsmatrikel.
3. Koordinaterna för karakteristiska punkter för gränserna för tomter och karakteristiska punkter för gränserna för konturen av en byggnad, struktur eller föremål av oavslutad konstruktion på en tomt bestäms med följande metoder:
1) geodetisk metod (metod för triangulering, polygonometri, trilatering, metod för direkt, bakåt eller kombinerad seriffer och andra geodetiska metoder);
2) genom metoden för geodetiska satellitmätningar (bestämningar);
3) fotogrammetrisk metod;
4) kartometrisk metod.
4. Identifieringen av karakteristiska punkter på gränsen för en tomt på marken med gränsskyltar utförs på begäran av kunden av fastighetsarbete. Utformningen av gränsmärket bestäms av kontraktet. När det gäller fastställande av karakteristiska punkter för gränsen för en tomt med gränstecken, hänvisar deras koordinater till de fasta (utsedda) centrumen för gränsmärken.
5. Arbetsmetoden för att bestämma koordinaterna för karakteristiska punkter fastställs av fastighetsingenjören beroende på tillgänglig initial information och kraven för noggrannheten för att bestämma koordinaterna för karakteristiska punkter som antas i detta dokument.
6. Den geodetiska grunden för att bestämma de platta rektangulära koordinaterna för karakteristiska punkter på gränsen för en tomt är punkter i det statliga geodetiska nätverket och referensgränsnätverk.
Den geodetiska grunden för att bestämma de platta rektangulära koordinaterna för de karakteristiska punkterna på konturen av en byggnad, struktur eller föremål av oavslutad konstruktion är de karakteristiska punkterna på gränsen till tomten.
SKP-läget för en karakteristisk punkt av konturen av en byggnad, struktur eller föremål med ofullbordad konstruktion bestäms i förhållande till den närmaste karakteristiska punkten på markgränsen.
7. SKP-läget för den karakteristiska punkten för gränsen till tomtmarken bör inte överstiga standardnoggrannheten för att bestämma koordinaterna för de karakteristiska punkterna för gränserna för tomtmarken (bilaga nr 1).
8. SKP-läget för en karakteristisk punkt av konturen av en byggnad, struktur eller föremål av ofullbordad konstruktion bör inte överstiga standardnoggrannheten för att bestämma koordinaterna för karakteristiska punkter på konturen av en byggnad, struktur eller föremål av ofullbordad konstruktion:
för bosättningsmarker – 1m;
för övriga marker – 5 m.
Om konturen av en byggnad, struktur eller ett ofärdigt byggobjekt sammanfaller med gränsen för en tomt, bestäms koordinaterna för de karakteristiska punkterna för konturen av byggnaden, strukturen eller ofullbordade byggobjektet med standardnoggrannheten för att bestämma koordinaterna av de karakteristiska punkterna för gränserna för tomtmark.
Om en byggnad, struktur eller ofullbordat byggnadsobjekt är beläget på flera tomter för vilka olika standardnoggrannhet fastställs, så bestäms koordinaterna för de karakteristiska punkterna för byggnadens, konstruktionens eller det ofullbordade byggnadsobjektets kontur med en noggrannhet som motsvarar noggrannhet för att bestämma koordinaterna för de karakteristiska punkterna i konturerna av byggnaden, strukturen eller oavslutade objektkonstruktionen med högre precision.
9. För att bestämma UPC-platsen för en karakteristisk punkt används formler som motsvarar metoderna för att bestämma koordinaterna för karakteristiska punkter.
10. Geodetiska metoder.
Beräkning av SCP-platsen för karakteristiska punkter utförs med hjälp av programvara genom vilken fältmaterial bearbetas. I detta fall bifogas ett uttalande (utdrag) från programvaran till gränsplanen.
Vid bearbetning av fältmaterial utan användning av programvara för att bestämma UPC-platsen för en karakteristisk punkt, används formler för beräkning av UPC som motsvarar geodetiska metoder för att bestämma koordinaterna för karakteristiska punkter.
11. Metod för geodetiska satellitmätningar.
Beräkning av SCP-platsen för karakteristiska punkter utförs med hjälp av programvara genom vilken satellitobservationsmaterial bearbetas. I detta fall bifogas ett uttalande (utdrag) från programvaran till gränsplanen.
12. Kartometriska och fotogrammetriska metoder.
Vid bestämning av läget för karakteristiska punkter kombinerat med konturerna av geografiska objekt avbildade på en karta (plan) eller flygfoto, tas SKP lika med Mt = K*M.
Där M är nämnaren för kart- eller flygfotoskalan.
— För den fotogrammetriska metoden tas K lika med den grafiska noggrannheten (till exempel vid bestämning av platsen för karakteristiska punkter från fotografier - 0,0001 m);
— för den kartometriska metoden:
— för befolkade områden tas K lika med 0,0005 m;
- för jordbruk och andra marker
K tas lika med 0,0007 m.
13. Vid återställande av gränsen för en tomtmark på grund av uppgifter från statens fastighetsmatrikel, bestäms läget för de karakteristiska punkterna för gränsen för tomtmarken med standardnoggrannhet motsvarande de uppgifter som presenteras i bilaga nr. 1.
14. Om intilliggande tomter har olika kategorier, så bestäms de gemensamma karakteristiska punkterna för gränserna för tomterna med en noggrannhet som motsvarar noggrannheten för att bestämma koordinaterna för tomten med högre noggrannhet.
15. På kundens begäran kan kontraktet för matrikelarbete föreskriva bestämning av platsen för karakteristiska punkter på gränserna för tomten och konturerna av byggnader, strukturer eller oavslutade konstruktionsobjekt med högre noggrannhet än vad som fastställts i detta förfarande. I det här fallet utförs bestämningen av koordinaterna för karakteristiska punkter för gränserna för tomten, konturerna av byggnader, strukturer eller oavslutade föremål med den noggrannhet som anges i kontraktet.
16. Baserat på de beräknade koordinaterna för de karakteristiska punkterna på gränsen till tomten, sammanställs en katalog över dem, på grundval av vilken arean av tomten beräknas.
17. För att beräkna det maximala felet vid bestämning av arean för en tomt, används formeln:
∆Р — maximalt fel vid bestämning av arean för en tomt (kvm);
M t — det maximala värdet av medelkvadratfelet för platsen för karakteristiska punkter på gränsen till tomten, beräknat med hänsyn till arbetets teknik och noggrannhet (m);
R - landyta (kvm);
k— töjningskoefficient för tomtmarken, dvs. förhållandet mellan den största längden av en sektion och dess minsta bredd.
Bilaga nr 1
Standardnoggrannhet för att bestämma koordinaterna för karakteristiska punkter för landgränser
| Artikelnummer. | Kategori av mark, area av tomter | Medelkvadratfel, (m) |
| 1. | Jordbruksområde | |
| markyta upp till 1 hektar | 0,2 | |
| markområde upp till 100 hektar | ||
| landområde mer än 100 hektar | 2,5 | |
| 2. | Bosättningsmarker | 0,2 |
| 3. | Industriområden, energi, transporter, kommunikationer, radiosändningar, television, datavetenskap, mark som stöder rymdverksamhet, försvarsområden, säkerhet och mark för andra speciella ändamål | 0,5 |
| 4. | Mark med särskilt skyddade naturområden och föremål, skogsfondens marker, vattenfondens marker och reservmarker | 5,0 |
©2015-2018 poisk-ru.ru
Alla rättigheter tillhör deras upphovsmän. Denna webbplats gör inte anspråk på författarskap, men erbjuder gratis användning.
Upphovsrättsintrång och kränkning av personuppgifter
Testar noggrannheten hos GPS-mottagare för mobiltelefoner
Under arbetet med ett projekt behövde vi ta reda på den verkliga (och inte deklarerade) exaktheten för geopositionering för olika smartphones.
För detta ändamål användes en stationär mottagare från Topcon, vars avläsningar togs som standard. De testade enheterna var placerade på samma plats. Efter en kallstart hölls ytterligare 2 minuter för en mer exakt bestämning av koordinaterna.
Följande enheter deltog i testet:
- Fly IQ447 ($80);
- Nokia Lumia 625 ($100);
- Samsung Galaxy Tab 2;
- Industriell smartphone Motorola TC-55 – ($1500);
- Industriell smartphone Coppernic C-One ($1500);
Det såg ut så här:


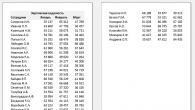
Som ett resultat var resultaten (avvikelsen mellan koordinaterna för smartphones och koordinaterna för en stationär mottagare) som följer:
- Fly IQ447 (GPS) – 1-3 meter;
- Coppernic C-One (GPS + GLONASS) – 2 meter;
- Motorola TC-55 (GPS + GLONASS) – 6 meter;
- Samsung Galaxy Tab 2 (GPS) – 8 meter;
- Nokia Lumia 625 (GPS) – 30 meter.
Motorola var lite besviken - för sitt pris förväntades resultaten bli bättre.
Men det som förvånade mig mest var Fly-telefonen. För sitt pris på 3 000 rubel visade det sig vara det mest exakta; trots att den inte har en Glonass-mottagare. Vi kontrollerade resultaten flera gånger, men de visade sig alltid vara utmärkta.
Den här telefonen är förresten den enda som alltid och överallt på ett flygplan från en kallstart hittar satelliter och beräknar koordinater. Trots till synes goda mottagningsförhållanden hittar de flesta andra telefoner inte alltid en signal från ett tillräckligt antal satelliter under flygning – ibland kan man vänta 20 minuter, men ändå inte kunna fastställa koordinaterna.
Förresten, vi ville från början inte ta koordinaterna för en punkt på en karta (till exempel Yandex) som standard. Vi är medvetna om möjliga avvikelser mellan kartor och verkliga koordinater. På vår plats nära Yandex var storleken på denna avvikelse cirka 5 meter.
GPS är ett satellitnavigeringssystem som mäter avstånd, tid och bestämmer plats. Låter dig bestämma platsen och hastigheten för objekt var som helst på jorden (inte inklusive polarområdena), i nästan alla väder, såväl som i yttre rymden nära planeten. Systemet utvecklas, implementeras och drivs av det amerikanska försvarsdepartementet.
Korta egenskaper hos GPS
Det amerikanska försvarsdepartementets satellitnavigeringssystem är GPS, även kallat NAVSTAR. Systemet består av 24 navigation artificiella jordsatelliter (NES), markkommando-mätning av komplex och konsumentutrustning. Det är ett globalt, allvädersnavigationssystem som ger bestämning av koordinaterna för objekt med hög noggrannhet i tredimensionellt nära jordens rymd. GPS-satelliter är placerade i sex medelhöga banor (höjd 20 183 km) och har en omloppstid på 12 timmar. Orbitalplanen är placerade med 60° intervall och lutar mot ekvatorn i en vinkel på 55°. Det finns 4 satelliter i varje bana. 18 satelliter är det minsta antalet för att säkerställa synlighet av minst 4 satelliter vid varje punkt på jorden.
Grundprincipen för att använda systemet är att bestämma plats genom att mäta avstånd till ett objekt från punkter med kända koordinater - satelliter. Avståndet beräknas av fördröjningstiden för signalutbredning från att den sänds av satelliten till att den tas emot av GPS-mottagarens antenn. Det vill säga, för att bestämma tredimensionella koordinater behöver GPS-mottagaren veta avståndet till tre satelliter och tiden för GPS-systemet. Således används signaler från minst fyra satelliter för att bestämma mottagarens koordinater och höjd.
Systemet är utformat för att ge navigering av flygplan och fartyg och bestämma tid med hög precision. Den kan användas i tvådimensionellt navigeringsläge - 2D-bestämning av navigeringsparametrar för objekt på jordens yta) och i tredimensionellt läge - 3D (mätning av navigeringsparametrar för objekt ovanför jordens yta). För att hitta den tredimensionella positionen för ett objekt är det nödvändigt att mäta navigationsparametrarna på minst 4 NIS, och för tvådimensionell navigering - minst 3 NIS. GPS använder en pseudo-avståndsmätare för att bestämma position och en pseudo-radial hastighetsmetod för att hitta ett objekts hastighet.
För att förbättra noggrannheten bestämningsresultaten jämnas ut med hjälp av ett Kalman-filter. GPS-satelliter sänder navigeringssignaler vid två frekvenser: F1 = 1575,42 och F2 = 1227,60 MHz. Strålningsläge: kontinuerlig med pseudobrusmodulering. Navigationssignaler är en offentlig C/A-kod (kurs och inhämtning), sänds endast på F1-frekvensen, och en skyddad P-kod (precisionskod), som sänds ut på F1, F2-frekvenserna.
I GPS har varje NIS sin egen unika C/A-kod och unika P-kod. Denna typ av satellitsignalseparation kallas kodseparation. Det gör det möjligt för ombordutrustning att känna igen vilken satellit en signal tillhör när de alla sänder på samma frekvens GPS ger två nivåer av kundservice: PPS Precise Positioning Service och SPS Standard Positioning Service PPS är baserad på en exakt kod, och SPS - allmänt tillgänglig. PPS-servicenivån tillhandahålls den amerikanska militären och federala tjänster, och SPS tillhandahålls till den civila masskonsumenten. Förutom navigationssignaler sänder satelliten regelbundet meddelanden som innehåller information om satellitens status, dess efemeri, system. tid, jonosfärisk fördröjningsprognos och prestandaindikatorer. GPS-utrustning ombord består av en antenn och en mottagarindikator. PI inkluderar en mottagare, en dator, minnesenheter, kontroll- och displayenheter. Minnesblocken lagrar nödvändig data, program för att lösa problem och styra mottagarens indikatorfunktion. Beroende på syftet används två typer av utrustning ombord: specialutrustning och för masskonsument. Specialutrustning är utformad för att bestämma kinematiska parametrar för missiler, militära flygplan, fartyg och specialfartyg. När man hittar objektparametrar använder den P- och C/A-koder. Denna utrustning ger praktiskt taget kontinuerliga bestämningar med noggrannhet: objektets placering— 5+7 m, hastighet — 0,05+0,15 m/s, tid — 5+15 ns
Huvudapplikationer för GPS-navigationssatellitsystem:
- Geodesi: med hjälp av GPS bestäms de exakta koordinaterna för punkter och gränser för tomter
- Kartografi: GPS används i civil och militär kartografi
- Navigation: GPS används för både sjö- och vägnavigering
- Satellitövervakning av transporter: med hjälp av GPS övervakas fordonens position och hastighet, och deras rörelser kontrolleras
- Mobiltelefoner: De första mobiltelefonerna med GPS dök upp på 90-talet. I vissa länder, som USA, används detta för att snabbt fastställa platsen för en person som ringer 911.
- Tektonik, platttektonik: använda GPS för att observera plattornas rörelser och vibrationer
- Aktiv rekreation: det finns olika spel som använder GPS, till exempel Geocaching, etc.
- Geotaggning: information, som fotografier, är "länkad" till koordinater tack vare inbyggda eller externa GPS-mottagare.
Fastställande av konsumentkoordinater
Positionering efter avstånd till satelliter
Platskoordinaterna beräknas utifrån de uppmätta avstånden till satelliterna. Fyra mätningar krävs för att bestämma platsen. Tre dimensioner är tillräckligt om du kan eliminera osannolika lösningar på något annat tillgängligt sätt. Ytterligare en mätning krävs av tekniska skäl.
Mätning av avståndet till en satellit
Avståndet till en satellit bestäms genom att mäta hur lång tid det tar för en radiosignal att färdas från satelliten till oss. Både satelliten och mottagaren genererar samma pseudo-slumpmässiga kod strikt samtidigt på en gemensam tidsskala. Låt oss avgöra hur lång tid det tog signalen från satelliten att nå oss genom att jämföra fördröjningen av dess pseudo-slumpmässiga kod med avseende på mottagarkoden.
Säkerställer perfekt timing
Exakt timing är nyckeln till att mäta avstånd till satelliter. Satelliter är exakta i tiden eftersom de har atomur ombord. Mottagarklockan kanske inte är perfekt, eftersom dess drift kan elimineras med hjälp av trigonometriska beräkningar. För att få denna möjlighet är det nödvändigt att mäta avståndet till den fjärde satelliten. Behovet av fyra mätningar bestäms av mottagarens design.
Fastställande av satellitens position i yttre rymden.
För att beräkna våra koordinater behöver vi veta både avstånden till satelliterna och var och en av dem i yttre rymden. GPS-satelliter färdas så högt att deras banor är mycket stabila och kan förutsägas med stor noggrannhet. Spårningsstationer mäter ständigt små förändringar i banor och data om dessa förändringar sänds från satelliter.
Jonosfäriska och atmosfäriska signalfördröjningar.
Det finns två metoder som kan användas för att hålla felet till ett minimum. Först kan vi förutsäga vad den typiska hastighetsändringen skulle vara en typisk dag, under genomsnittliga jonosfäriska förhållanden, och sedan tillämpa en korrigering på alla våra mätningar. Men tyvärr är inte varje dag vanlig. En annan metod är att jämföra utbredningshastigheterna för två signaler med olika bärvågsfrekvenser. Om vi jämför utbredningstiden för två olika frekvenskomponenter i GPS-signalen kan vi ta reda på vilken typ av avmattning som ägde rum. Denna korrigeringsmetod är ganska komplex och används endast i de mest avancerade, så kallade "dual-frequency" GPS-mottagarna.
Flervägs.
En annan typ av fel är "multipath"-fel. De uppstår när signaler som sänds från en satellit upprepade gånger reflekteras från omgivande föremål och ytor innan de når mottagaren.
Geometrisk faktor som minskar noggrannheten.
Bra mottagare är utrustade med beräkningsprocedurer som analyserar de relativa positionerna för alla observerbara satelliter och väljer fyra kandidater från dem, d.v.s. bäst placerade fyra satelliter.
Resulterande GPS-noggrannhet.
Det resulterande GPS-felet bestäms av summan av fel från olika källor. Bidraget från var och en varierar beroende på atmosfäriska förhållanden och kvaliteten på utrustningen. Dessutom kan noggrannheten medvetet minskas av det amerikanska försvarsdepartementet som ett resultat av att det så kallade S/A-läget (Selective Availability) installerats på GPS-satelliter. Detta läge är utformat för att förhindra en potentiell fiende från att få en taktisk fördel i GPS-positionering. När och om detta läge är inställt skapar det den viktigaste komponenten av det totala GPS-felet.
Slutsats:
Noggrannhet av mätningar att använda GPS beror på mottagarens design och klass, antalet och placeringen av satelliter (i realtid), jonosfärens tillstånd och jordens atmosfär (tunga moln, etc.), närvaron av störningar och andra faktorer. "Hushålls" GPS-enheter, för "civila" användare, har ett mätfel i intervallet från ±3-5m till ±50m och mer (i genomsnitt är den verkliga noggrannheten, med minimal störning, om nya modeller, ±5-15 meter i plan). Högsta möjliga noggrannhet når +/- 2-3 meter horisontellt. Höjd – från ±10-50m till ±100-150 meter. Höjdmätaren blir mer exakt om du kalibrerar den digitala barometern efter närmaste punkt med en känd exakt höjd (från en vanlig atlas, till exempel) på en platt terräng eller med känt atmosfärstryck (om det inte ändras för snabbt när vädret ändringar). Högprecisionsmätare av "geodetisk klass" - mer exakt med två till tre storleksordningar (upp till en centimeter, i plan och i höjd). Den faktiska noggrannheten av mätningar bestäms av olika faktorer, till exempel avstånd från närmaste basstation (korrigerings-) i systemets serviceområde, mångfald (antal upprepade mätningar/ackumuleringar vid en punkt), lämplig kvalitetskontroll av arbetet, nivå av mätningar utbildning och praktisk erfarenhet av specialisten. Sådan högprecisionsutrustning kan endast användas av specialiserade organisationer, specialtjänster och militären.
För att förbättra navigeringsnoggrannheten Det rekommenderas att använda en GPS-mottagare i ett öppet utrymme (inga byggnader eller överhängande träd i närheten) med ganska platt terräng, och ansluta en extra extern antenn. I marknadsföringssyfte tillskrivs sådana enheter "dubbel tillförlitlighet och noggrannhet" (avser de samtidigt använda två satellitsystemen, Glonass och Gypies), men den faktiska faktiska förbättringen av parametrar (ökad noggrannhet vid bestämning av koordinater) kan uppgå till endast upp till flera tiotals procent. Endast en märkbar minskning av varm-varm-starttiden och mättiden är möjlig
Kvaliteten på GPS-mätningar försämras om satelliterna är placerade på himlen i en tät stråle eller på en linje och "långt" - nära horisonten (allt detta kallas "dålig geometri") och det finns signalstörningar (höghus) blockerar signalen, träd, branta berg i närheten, reflekterar signalen). På jordens dagsida (för närvarande upplyst av solen) - efter att ha passerat genom jonosfäriskt plasma försvagas och förvrängs radiosignaler en storleksordning starkare än på nattsidan. Under en geomagnetisk storm, efter kraftiga solflammor, är avbrott och långa avbrott i driften av satellitnavigeringsutrustning möjliga.
Den faktiska noggrannheten hos GPS:en beror på typen av GPS-mottagare och funktionerna för datainsamling och bearbetning. Ju fler kanaler (det måste finnas minst 8) i navigatorn, desto mer exakt och snabbare bestäms de korrekta parametrarna. När man tar emot "extra A-GPS-platsserverdata" via Internet (via paketdataöverföring, i telefoner och smartphones), ökar hastigheten för att bestämma koordinater och plats på kartan
WAAS (Wide Area Augmentation System, på den amerikanska kontinenten) och EGNOS (European Geostationary Navigation Overlay Services, i Europa) - differentiella delsystem som sänder genom geostationära (på höjder från 36 tusen km på lägre breddgrader till 40 tusen kilometer över mellan- och höga latituder) satelliter som korrigerar information till GPS-mottagare (korrigeringar införs). De kan förbättra kvaliteten på positioneringen av en rover (fält, mobil mottagare) om markbaserade baskorrigeringsstationer (stationära referenssignalmottagare som redan har en högprecisionskoordinatreferens) finns och arbetar i närheten. I detta fall måste fält- och basmottagarna samtidigt spåra satelliterna med samma namn.

För att öka mäthastigheten Det rekommenderas att använda en flerkanals (8-kanals eller fler) mottagare med en extern antenn. Minst tre GPS-satelliter måste vara synliga. Ju fler det är desto bättre blir resultatet. God sikt över himlen (öppen horisont) är också nödvändigt. En snabb, "het" (varar under de första sekunderna) eller "varmstart" (en halv minut eller en minut, i tid) av den mottagande enheten är möjlig om den innehåller en uppdaterad, färsk almanacka. I fallet när navigatorn inte har använts på länge, tvingas mottagaren ta emot hela almanackan och när den slås på kommer en kallstart att utföras (om enheten stöder AGPS, då snabbare - upp till några sekunder). För att endast bestämma horisontella koordinater (latitud/longitud) kan det räcka med signaler från tre satelliter. För att få tredimensionella (med höjd) koordinater behövs minst fyra koordinater. Behovet av att skapa vårt eget inhemska navigationssystem beror på det faktum att GPS är amerikanskt, potentiella motståndare som när som helst, i sina militära och geopolitiska intressen, selektivt kan inaktivera, "jamma", modifiera det i vilken region som helst eller öka artificiellt , ett systematiskt fel i koordinater (för utländska konsumenter av denna tjänst), som alltid är närvarande i fredstid.