Alexei Navalnys Anti-Corruption Foundation lyckades ta reda på att planet används av tjänstemannen inte bara för att flyga till affärsmöten, utan också för att ta sina hundar till olika internationella utställningar och tävlingar. Men det civila samhällets glädje över de möjligheter som öppnade upp för dem att identifiera tjänare till de människor som lever över sina tillgångar var kortlivad - de ovan nämnda tjänsterna stängde av möjligheten att övervaka flygningarna för vice premiärministern och hans hundar, och de ignorerade alla frågor om lagligheten av ett sådant beslut.
Vad ska man göra?
Om kommersiella flygspårningstjänster ställer sig på regeringens sida och vägrar att publicera information om flygplan som ägs av tjänstemän, kan vi medborgare skaffa dessa uppgifter själva. Efter att ha spenderat cirka fyra tusen rubel på utrustning och ett par dagars ledig tid för montering och installation, kan vem som helst delta i projektet för oberoende spårning av flygfordon - ADSBexchange.com.
Hur det fungerar?
Varje modernt flygplan är utrustat med en så kallad ADS-B-transponder - en enhet som sänder information om sig själv med en viss frekvens som svar på en begäran från en radarstation (radar) - en unik identifierare för flygplanet, samt data på plats, flyghastighet och några andra. Det viktiga här är att vem som helst kan ta emot och avkoda denna information med hjälp av gratis tillgänglig billig hushållsutrustning - en digital USB-tv-mottagare av DVB-T-standarden ansluten till en Raspberry Pi-enkortsdator med ett avkodarprogram som körs på den.
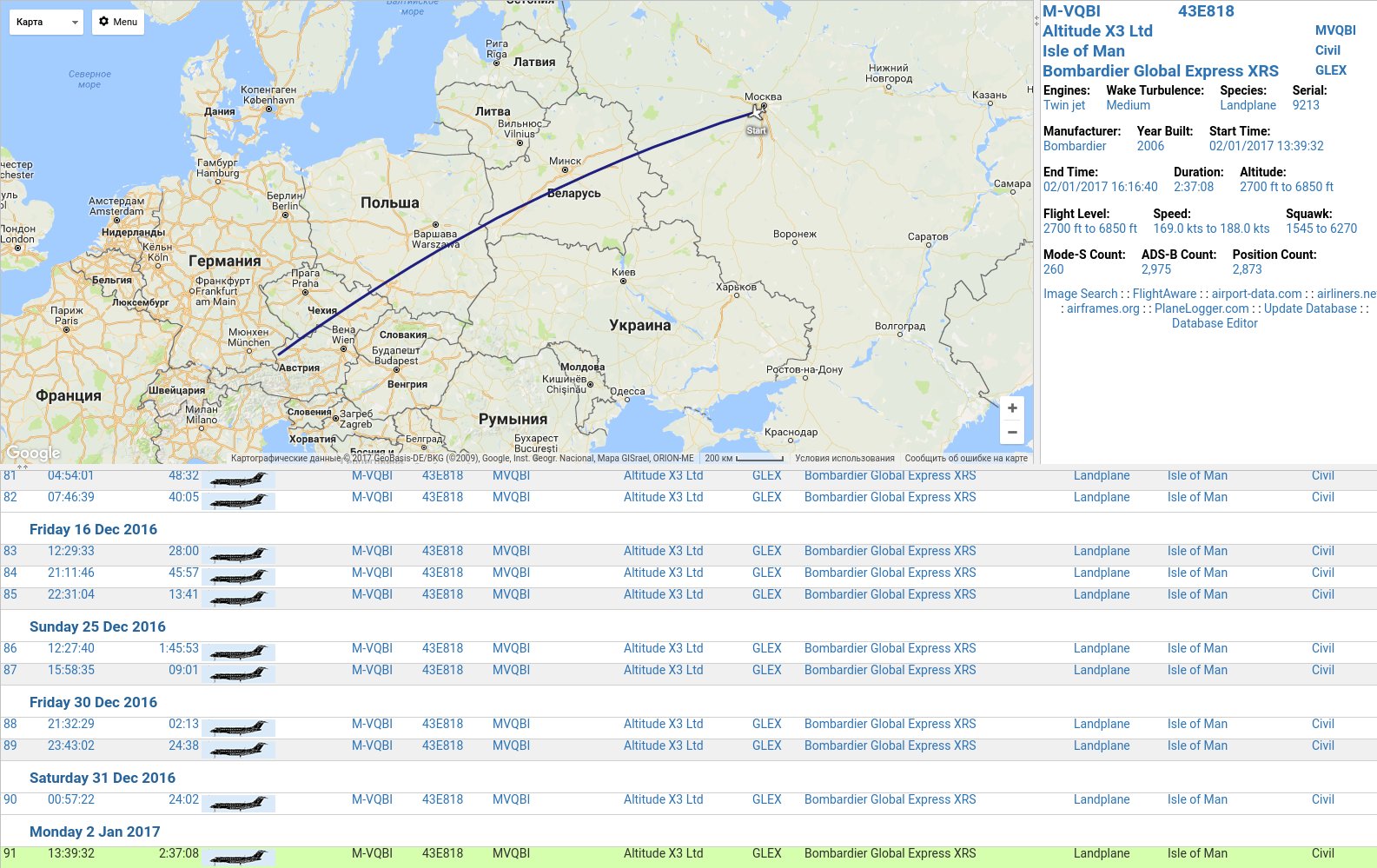
Avkodad information om flygplan inom mottagarens siktlinje kan ses lokalt, men för att spåra ett flygplans fullständiga rutt från ursprung till destination måste information från mottagare vid alla mellanliggande punkter kombineras. Det är precis detta som tjänsten ADSBexchange.com är avsedd för, att skapa, på basis av data mottagna från lokala mottagningsstationer, en global karta över flygningar - Global Radar View, funktionellt lik den för tjänster som PlaneFinder.net och FlightRadar24. com, men, till skillnad från dem, döljer inte någon information om spårade flygplan från slutanvändare. Till exempel kan vi se att för nyårshelgerna flög vice premiärministern igen till sin dacha i Österrike:
Ju fler mottagningsstationer som är anslutna till tjänsten, desto mer komplett är täckningen, och i Rysslands fall är situationen fortfarande mycket tråkig - titta bara på kartan och jämför antalet stationer i vårt land med antalet stationer i Europa.

Men vi har makten att förändra den nuvarande situationen! För att göra detta behöver du bara bygga din egen mottagningsstation och inkludera den i ADSBexchange-nätverket.
Vad behövs för detta?
1. Raspberry Pi
Den mest populära enkortsmikrodatorn i världen, det finns flera modeller som skiljer sig åt i minneskapacitet, processorfrekvens och uppsättning kringutrustning. För våra ändamål kommer alla modeller med en Ethernet-port ombord att vara lämpliga, till exempel Raspberry Pi 3 Model B:

Du kan köpa det tillsammans med strömförsörjningen och fodralet på Aliexpress till ett pris av cirka 3000 rubel, till exempel. Du kan också titta på inhemska säljare, men priset blir förstås betydligt högre.
2. Minneskort
Raspberry Pi 3 kräver ett MicroSD-minneskort. Tidigare modeller använder ett SD-kort i full storlek. Rekommenderad volym - 8GB, hastighetsklass - 10. Från betrodda tillverkare kan jag rekommendera SanDisk eller Transcend-kort. Utropspriset är cirka 300 rubel.
3. USB DVB-T-mottagare

Nyckelord att söka på Aliexpress - "RTL2832U R820T2", pris cirka 500 rubel, till exempel den här. Du kan titta på lokala säljare, men en mottagare som ser exakt likadan ut till utseendet kan visa sig vara byggd på andra marker, så du måste kolla med säljaren att det är kombinationen RTL2832U+R820T2 inuti.
4. Antenn
USB-mottagaren kommer med en antenn, men den är milt sagt inte väl lämpad för att ta emot signaler från flygplanstranspondrar, så mottagningsradien med den blir liten – som mest några tiotals kilometer. För att få en radie på hundratals kilometer måste den bytas ut mot en mer lämplig. Det enklaste alternativet är att ersätta standardantennstiftet med en kolineär antenn med tre element, som kan böjas av koppar- eller ståltråd enligt följande ritning (klickbar):

Det borde se ut ungefär så här:

Det bästa alternativet, som ger en maximal mottagningsräckvidd på upp till 400 km, är att använda en koaxial kolinjär antenn.
Eftersom mottagning av radiosignaler från flygplanstranspondrar endast är möjlig inom synhåll, måste antennen placeras utomhus, helst på taket. För att göra detta kan du använda antingen en USB-förlängningskabel upp till 5 meter lång, placera endast mottagaren i en förseglad låda, eller PoE (i det här fallet måste du också placera Raspberry Pi i lådan).
5. Programvara
ADSBexchange använder för närvarande en modifierad PiAware-distribution. Denna distribution har utvecklats av FlightAware, som också tillhandahåller en spårningstjänst för kommersiella flygplan, men tyvärr döljer den i sin ursprungliga form information om privata flygplan. Denna distribution används som grund för ADSBexchange, eftersom den är mycket enkel att installera och konfigurera.
Steg-för-steg-instruktioner för Windows:
- Ladda ner distributionspaketet https://www.adsbexchange.com/downloads/ADSBexchange-img-1.2.zip (868 MB) och spara det på din dator.
- Packa upp filen ADSBexchange-img-1.2.zip.
- Ladda ner verktyget Win32DiskImager och kör det som administratör (för att göra detta, högerklicka på filen och välj "Kör som administratör").
- Välj filen ADSBexchange-img-1.2.img.
- Sätt i SD-kortet i din dators kortläsare.
- Välj SD-kortbokstav från motsvarande lista.
- Klicka på "spela in" och vänta några minuter tills det är klart.
- När du är klar tar du bort minneskortet från kortläsaren och sätter in det i Raspberry Pi.
- Anslut alla kablar (USB-ström, Ethernet-kabel, USB-mottagare) till Raspberry Pi. I det här fallet bör den röda lysdioden på Raspberry Pi lysa och den gröna lysdioden blinka, och de gröna och gula lysdioderna nära Ethernet-nätverkskontakten ska vara tända.
- Vänta ett par minuter tills Raspberry Pi startar.
- Registrera ett nytt konto på FlightAwares webbplats.
- Länka mottagaren till det skapade kontot.
- I mottagarinställningarna ("My ADS-B"-fliken), redigera mottagarens platskoordinater och antenninstallationshöjden över marknivån.
- Efter en tid bör mottagaren visas på täckningskartan https://www.adsbexchange.com/active-feeds/.
- Flygplanet som för närvarande spåras av din mottagande station kan ses genom att klicka på länken "Webbgränssnitt: visa livedata" på fliken "My ADS-B" på FlightAwares webbplats.
VINST!
Nu deltar din mottagare i två flygspårningsnätverk samtidigt - ADSBexchange och, som en bonus, FlightAware. Dela ut den här instruktionen, hjälp andra att bygga sina egna mottagningsstationer, och Shuvalovs hundflygande flygplan kommer inte att kunna gömma sig för civilsamhällets allseende öga!
Med kompetensen att arbeta med mikrokontroller kan du göra en radar själv med hjälp av mikrokretsar, en uppsättning ledningar, en infraröd sensor och andra enheter. Det är också nödvändigt att ha ett diagram för vidare montering.
Du kommer behöva
- - färdigheter i att arbeta med radioutrustning och mikrokontroller.
Instruktioner
Visste du inte hur man ställer in eller optimerar radarn i CS GO? I det här ämnet kommer vi att ta en titt på radarinställningarna i CS Global Offensive. Vad behövs för att konfigurera radarn? Allt görs väldigt enkelt, du behöver inte ladda ner någon ytterligare programvara, allt du behöver är:
Slår på konsolen
Om du har problem med att öppna konsolen, följ dessa instruktioner:
- Starta CS:GO;
- Inställningar → Spelinställningar;
- Aktivera utvecklarkonsolen → Ja;
- Inställningar → Tangentbord/mus;
- Scrolla till botten och du kommer att se "Öppna konsolen" är påslagen " ` " - du kan ställa in vilken nyckel som helst.
Nu kan du börja ställa in!
Radarinställning
Det första jag skulle råda dig att göra är att skapa ett spel med bots så att de inte kan döda dig och ställa in radarn direkt i spelet. Låt oss börja:
Aktivera/inaktivera radar
Till sätta på radar måste anges i konsolkommandot drawradar;
För att Dölj radar används av konsolkommandot hideradar;
cl_hud_radar_scale
Detta kommando är ansvarigt för storleken på radarn på din skärm.
 |
|
| cl_hud_radar_scale "0,8" | cl_hud_radar_scale "1.3" |
| Minimum: "0.8" // Maximum: "1.3" | |
cl_radar_alltid_centrerad
Spelaren är alltid på radarn. Vid en första anblick kan det tyckas att det inte är så stor skillnad, men plusset är uppenbart - när du är i hörnet på kartan har du tillgång till en större överblick över området på radarn än om du befann dig i mitten av radarn.
 |
 |
| cl_radar_always_centered "0" | cl_radar_always_centered "1" |
| Det finns två variabler tillgängliga för val, antingen 0 eller 1 | |
cl_radar_icon_scale_min
Detta kommando ändrar storleken på de olika ikonerna på din radar.
| cl_radar_icon_scale_min "0,4" | cl_radar_icon_scale_min "1.0" |
| Minimum: "0.4" // Maximum: "1.0" | |
cl_radar_rotate
Aktivera eller inaktivera radarrotation. De där. Om den är inaktiverad kommer kartan på radarn alltid att vara i samma position.
 |
 |
| cl_radar_rotate "0" | cl_radar_rotate "1" |
| Kan ställas in på antingen 0 eller 1 | |
cl_radar_scale
Ändra skalan på kartan som visas på radarn.
 |
 |
| cl_radar_scale "0,25" | cl_radar_scale "1.0" |
| Minimum: "0.25" // Maximum: "1.0" | |
cl_hud_bomb_under_radar
Det här kommandot aktiverar och inaktiverar även visningen av bombikonen när du bär en, eller när du inte har en.
Ändra radarns storlek dynamiskt
Det finns fall där kartans skala på radarn behöver ökas eller omvänt minskas. Detta kan göras med bindningen nedan:
Bind "KP_plus" "incrementvar cl_radar_scale 0.25 1.0 0.05";//öka radarstorleken binda "KP_minus" "incrementvar cl_radar_scale 0.25 1.0 -0.05"; //minska radarstorleken
Denna bindning låter dig klicka på en knapp + eller - dynamiskt ändra radarstorlek när du trycker. Knapparna kan vara vad du vill.
Standard radarinställningar
cl_hud_radar_scale "1"; cl_radar_always_centered "1"; cl_radar_icon_scale_min "0,6"; cl_radar_rotate "1"; cl_radar_scale "0,7"; cl_hud_bomb_under_radar "1";Idén att skapa någon sorts radar för att bestämma avstånd kom till en av mina elever. Vi fortsatte dess utveckling och beslutade att införa den i kursprogrammet som ett av projekten.
Efter ett par veckors förberedelser bestämde vi äntligen hur vi skulle starta det och vad som kan behövas för detta. Projektet behövde inte vara särskilt avancerat; Vi ställer in svårighetsgraden till medel. Nedan är ett exempel på hur man använder en personlig radar för smalt avstånd. Han skulle se lite rolig ut, så man kan skratta!
Beskrivning och syfte med projektet
Målet med projektet var att skapa en fungerande radar. Systemet behöver bara mäta avståndet i en vinkel på 90 grader, som visas i exemplet ovan. Beroende på vald sensor fungerar systemet inom intervallet 4-30 cm, 20-150 cm och 1-5,5 m.
Resultaten av projektet kommer att påverka efterföljande utvecklingar där vi försöker integrera radar för navigering av mobila robotar i naturliga miljöer.
Elektroniska delar
- Spänningsstabilisator LM7805 5V
- Mikrokontroller PIC18F452
- IR-sensor GP2D120
- Kvartsresonator vid 4 eller 8 MHz
- Växla
- Kondensator
- 30-polig kontakt
- 5 triggers 74LS373
- Brödbräda
- Löda
- 36 indikatorer
- Tråd 30 AWG
- Trådverktyg
- Lödkolv
Detaljerad lista över reservdelar
Du kanske vet allt om delarna ovan, eller kanske inte, så för att hjälpa dig förstå dem har en bild av varje del inkluderats. Tre nya objekt har dykt upp som inte tidigare specificerats i projektet: ett servosystem och IR-sensorer. En beskrivning av IR-sensorerna kommer snart; När det gäller 74HCT373 kommer en kort översikt att ges nedan. Du kan alltid kontrollera chipspecifikationerna genom att helt enkelt söka efter "74HCT373."

Ett åttabitars chip som innehåller en trestabil trigger. Enkelt uttryckt kan detta chip lagra 8 bitar av digital logik och hålla det i minnet tills det raderas eller modifieras via LE-Latch Enable-stiftet.
Arbetsprinciper
- Styrstift LE och OE
- 8 Dataingång D0-D7
- 8 Datautgång D0-D7
Ström (Vcc & GND.)
Utgångsaktivering (OE) tillåter Q0-Q7 att mata ut data för närvarande i D-vipporna.
Aktivering av vippan (LE) gör att data som finns på D0-D7 kan skrivas över till D-vippan.
Kretsöversikt
Schemat för detta projekt är mycket mer komplext än de tidigare. Vår utveckling har fyra huvudsakliga fördelar.
- Vi kommer att kunna programmera bilder från tavlan som utvecklas.
- Vi kommer att kontrollera servosystemet.
- Vi tar data från IR-avståndssensorn.
- Vi kommer att installera 36 LEV-indikatorer för att visa utdata från IR-sensorn.
Kretsegenskaper
Näring
- Strömförsörjning sker via ett 9V batteri anslutet till LM7805 med en 1uF kondensator ansluten till stiftet/jorden för att ge oavbruten likström till LM7805.
- Programcykel
- Programmering åstadkoms genom att ansluta två kontakter från styrenheten till programmeraren, vilket ger den första kontakten på programmeraren tillgång till MCLR*/Vpp-Pin1 på styrenheten. Av säkerhetsskäl installeras en likriktardiod.
- IR avståndssensor
- IR-sensorn använder en kontrollkontakt PIN 2 - RA0. De analoga funktionerna hos denna pin används för att erhålla ADC-värdet, eftersom endast en analog signal erhålls från IR-sensorn. Detta värde talar om för dig om det finns något inom sensorns räckvidd.
LED indikering
Det finns totalt 40 LED-indikatorer. Varje 74HCT373-chip styr upp till 8 indikatorer; eftersom 40/8=5 behöver vi 5 74HCT373-kretsar för att driva alla 40 indikatorerna. Det bör noteras i diagrammet att alla 5 chips använder en databuss.
Teori
Denna utveckling använder tre huvudenheter för att skapa en personlig radar. IR-sensorn ansluts till mikrokontrollern och matas sedan ut till indikatorsegmentet. En visuell demonstration av denna process tillhandahålls:
Använda olika sensorer
En viktig aspekt av noggrannheten hos de IR-sensorer som används i detta projekt är att de har samma spänningsegenskaper, så det här programmet är kompatibelt med alla indikatorer. Det enda du behöver veta är hur sensorn används för att bestämma avståndet som visas på indikatorerna.
Användande
Så låt oss ta en titt på enhetens slutliga utseende:

Så här ser den sammansatta enheten ut. Låt oss gå vidare till nästa avsnitt och fortsätta att montera enheten.
Plasthuset nedan på bilden nämndes inte i reservdelslistan. Detta är ett vanligt fodral som kan köpas från vilken elektroniktillverkare eller återförsäljare som helst. Först och främst måste du borra 36 hål för indikatorerna i kretsen och fixa indikatorerna i dem. Ett lim användes innan indikatorerna fördes in i hålen.

Efter att panelen är lödd börjar vi ansluta kretsen. Varje tråd måste anslutas genom ett litet hål i huset.

Bilden ovan visar panelen i ett tidigt skede. I början av anslutningen av ledningarna finns det en ansamling av ett stort antal av dem, till exempel så här:


Den sista touchen för att utveckla en personlig radar är möjligheten att använda den online. Ledningar 2-4 meter långa används vid anslutning av servosystem och IR-sensor. Vi gör ett hål på framsidan av höljet för dessa ledningar:
När vi är klara med monteringen, låt oss gå vidare till mjukvarudelen av utvecklingen. Detta är naturligtvis en mer subtil del av utvecklingen än att ens lägga ledningar.
Programvaran för den här enheten innehåller tre huvuddelar:
- Servokontroll
- LED indikeringskontroll
- ingång A/D/
Eftersom all programvara för detta projekt inte får plats på en sida kommer det att förklaras vad delarna är och hur de fungerar.
Servokontroll
Servosystemet styrs av timers och avbrott. Med två separata avbrott utlösta samtidigt för att skapa önskat ljud genereras en 50 GHz-signal och servopekaren rör sig i små steg för att justera det gnisslande ljudet.
Justering av LED-indikering.
Indikatorerna styrs av 74LS373/74HCT373 triggers. Systemet uppdaterar ständigt triggerdata som visas på indikatorerna.
A/D-ingång
IR-sensorn ger analog utgång. En omvandlare används för att bestämma spänningsvärdet, vilket indikerar att objektet har rört sig utanför IR-sensorns räckvidd.

Monteringen och konfigurationen av enheten är klar - du måste testa den. Beroende på vilken sensor du använder kommer indikationen att vara annorlunda. Sensorer att välja mellan: GP2D120, GP2Y0A21YK och GP2Y0A700K0F.
Data och observationer
Det första radartestet kommer att vara ett närområdestest. Plåtburkar användes som hinder.
I den andra videon (på första sidan) testas indikatorer på 20 cm - 150 cm och 1 m - 5,5 m, så att du kan övervinna mer allvarliga hinder. Ta en titt för att se vad vi pratar om.
Två videor kommer att demonstrera sensorns funktion, men om du monterar den själv kan det finnas några mindre svårigheter som kommer att beskrivas i slutsatsen.
HANDLA OM personlig radaröversikt
Att montera och ställa in den här enheten tar lite tid. Det här är ett projekt som du kan göra på en dag, och det har redan en nischapplikation, men allt eftersom kommer ytterligare utmaningar att dyka upp. IR-sensorer kan bli opålitliga och resultatet kan bli dåligt på grund av miljöpåverkan.
Åtgärder att vidta
För att öka sensorns täckningsradie är det planerat att använda ultraljudssensorer, motsvarande de "ljudsensorer" som beskrivs ovan, som överför data om avståndet från dig till objektet. Ultraljud har ett bredare räckvidd än infraröd strålning och är mer tillförlitligt i tuffa miljöer.
Slutsats
Projektet var en fascinerande studie av IR-sensorer. Det visar att resultaten faktiskt kan erhållas och användas. Många ytterligare projekt kan utvecklas utifrån detta.
Hur får man en stor radar i cs att gå för att se hela kartan?
Om du spelar med standardradarinställningarna kommer du inte att kunna se hela kartan. Erfarna spelare håller sin radar på radarn hela tiden (inte bokstavligen, förstås, men du fattar). Detta är nödvändigt för att förstå var både spelarens lagmedlemmar och motståndare finns (eller åtminstone var motståndarna nyligen befann sig).
Motståndare indikeras med röda prickar på radarn. Inom några sekunder efter att motståndaren försvunnit visas ett rött frågetecken på radarn.
Så här aktiverar du radar i cs go - drawradar
Så här inaktiverar du radarn i cs go - hideradar
cl_radar_icon_scale_min 0,6 - storlek på ikoner på radarn (intervall: 0 till 1)
cl_radar_scale 0,4 - kartskala (intervall: 0,2 - 1)
cl_radar_always_centered 0 - förskjutning av radarcentrum mot kartans synlighet, 1 - du är mitten av radarn
cl_radar_rotate 1 - aktivera kartrotation, 0 - inaktivera
cl_hud_radar_scale 1 - radarstorlek (intervall: 0,8 till 1,3)
hud_scaling 0,95 - gränssnittsstorlek (0,95 till 0,5)
drawradar - sätter på radarn
Om du vill stänga av radarn i cs go igen, skriv då detta kommando i konsolen:
hideradar - stänger av radarn
Hur konfigurerar man radarn i CS GO med hjälp av konsolkommandon?
Jag utnyttjade ofta radarkartan.
Till exempel, om jag är vid punkt A och mina teammedlemmar rusar till punkt B, och jag inte har tid att ta reda på det i chatten, kommer det tydligt att dyka upp på radarn. Dessutom, om någon i ditt team ser en terrorist med en bomb, kommer den att dyka upp på radarn.
Den här skärmdumpen visar vad vi vill uppnå:
- En radar där spelaren alltid är i centrum.
- Radar där hela kartan syns.
- Förstorad radar (inzoomat).
- Större ikoner. Detta kommer att göra det lättare för dig att upptäcka dina lagmedlemmar/fiender (valfritt).
- Minikarta (i allmänhet).
Låt oss nu gå vidare till inställningarna. Du måste lägga in dessa i din fil som heter config (även kallad autoexec). Vi kommer att titta på varje inställningsalternativ i tur och ordning. På så sätt vet du vad den gör och kan anpassa radarn så att den passar dina önskemål.
Om du bara vill ha inställningar kan du scrolla ner på sidan. De ges i slutet av artikeln.
Först och främst vill vi inte att radarn alltid ska vara centrerad, eftersom det skulle slösa mycket skärmutrymme när den är nära kartans kant.
För att göra detta måste du ändra parametern på motsvarande rad till "0":
cl_radar_always_centered "0"

Ser du? Nästan hälften av utrymmet upptas av det svarta området. Om radarn inte alltid är centrerad kommer vi att kunna se stora delar av kartan.
Nästa sak vi behöver göra är att zooma ut på kartan. På så sätt kan vi se ännu mer.
Ställ in följande parametervärde:
cl_radar_scale "0.3"

Innan detta kunde vi inte se hela kartan. Efter ändring av inställningarna visas alla kartområden permanent på radarn. Detta är väldigt bekvämt under respawns, när du inte vet var dina teammedlemmar är - du kan alltid se dem.
Skript för att öka storleken på radarn (Zoomscript)
Vi har tagit fram ett litet skript som låter dig öka/minska storleken på radarn. Detta kan göras genom att helt enkelt trycka på "+" eller "-".
Ange följande i din config- eller autoexec-fil:
// Radarskalning
bind "KP_plus" "incrementvar cl_radar_scale 0,25 1,0 0,05";
bind "KP_minus" "incrementvar cl_radar_scale 0,25 1,0 -0,05";
När du minskar storleken på radarn kan vissa detaljer förbises. För att kompensera för detta besvär kan vi öka radarns skala.
För att göra detta måste du använda kommandot:
cl_hud_radar_scale "1.15"

Som ni ser har skalan ökat. Jag räknade ut att 1,15 är det optimala förhållandet, vilket gör att du enkelt kan urskilja detaljer, men samtidigt tar inte radarbilden mycket plats på skärmen. Du kan experimentera med andra värden.
Det här steget är valfritt, men jag använde det. Det ökar storleken på ikoner som visas på radarn, vilket också kan vara användbart.
cl_radar_icon_scale_min "1"

Slutliga radarinställningar i CS GO
Nu kan vi utvärdera de ändrade inställningarna för radarn, på vilken hela kartan ständigt är synlig. Jämför dem med standardparametrar:

Det blev väldigt coolt.
Den enda nackdelen med de nya inställningarna är kartans låga detalj, men när radarstorleken ökar blir detaljerna lättare att urskilja. Men om du känner till kartan väl kommer detta inte att komplicera ditt liv mycket.
Optimerade radarinställningar (initialinställningar)
cl_radar_always_centered "0" ("1")
cl_radar_scale "0.3" ("0.7")
cl_hud_radar_scale "1.15" ("1")
cl_radar_icon_scale_min "1" ("0,6")
Två parametrar förblev oförändrade:
cl_radar_rotate "1"
cl_radar_square_with_scoreboard "1"



