Робототехника - прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Слово «робототехника» (в его английском варианте «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году.
Робот (чеш. robot, от robota - подневольный труд или rob - раб) - автоматическое устройство, созданное по принципу живого организма.
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
“Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.” И. М. Макаров, Ю. И. Топчеев. “Робототехника: История и перспективы”
Внешний вид и конструкция современных роботов могут быть весьма разнообразными. В настоящее время впромышленном производстве широко применяются различные роботы, внешний вид которых (по причинам технического и экономического характера) далёк от «человеческого».
История
Сведения о первом практическом применении прообразов современных роботов - механических людей с автоматическим управлением - относятся к эллинистической эпохе.
Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136-1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.

Чертежи Леонардо да Винчи
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн, скорее всего, основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. Он также изготовил механических уток, которые, как говорили, умели клевать корм и «испражняться».
Виды роботов
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков.

Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Несмотря на их высокую стоимость, численность промышленных роботов в странах с развитым производством быстро растёт. Основная причина массовой роботизации такова:
«Роботы выполняют сложные производственные операции по 24 ч в сутки. Выпускаемая продукция при этом имеет высокое качество. Они… не болеют, не нуждаются в обеденном перерыве и отдыхе, не бастуют, не требуют повышения заработной платы и пенсии. Роботы не подвержены влиянию температуры окружающей среды либо воздействию газов или выбросов агрессивных веществ, опасных для жизни человека».
Медицинские роботы
В последние годы роботы получают всё большее применение в медицине; в частности, разрабатываются различные модели хирургических роботов.
Ещё в 1985 году робот Unimation Puma 200 был использован для позиционирования хирургической иглы при выполнении биопсии головного мозга, проводившейся под управлением компьютера.
В 1992 году разработанный в Имперском колледже Лондона робот ProBot впервые осуществил операцию на предстательной железе, положив начало практической роботизированной хирургии.

Робот Da Vinci
С 2000 года компания Intuitive Surgical серийно выпускает робот Da Vinci, предназначенный для лапароскопических операций и установленный в нескольких сотнях клиник по всему миру.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.

Робот-пылесос iRobot
В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы «Вакамару» производства фирмы Mitsubishi. Робот стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением.
Всё большую популярность набирают роботы-уборщики (по своей сути - автоматические пылесосы), способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п.

Беспилотник
Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли).
В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.

В Технологическом институте Джорджии под руководством профессора Хенрика Кристенсена разработаны напоминающие муравьёв инсектоморфные роботы, способные обследовать здание на предмет наличия там врагов и мин-ловушек (доставляются к зданию «главным роботом» - мобильным роботом на гусеничном ходу).
Получили распространение в войсках и летающие роботы. На начало 2012 года военными во всём мире использовались около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
К роботам-учёным безусловно можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса. С их помощью были открыты т. н. «дверки Гантенбринка» и т. н. «ниши Хеопса». Исследования продолжаются.
Система передвижения
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).

Роботы BigDog
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками.
Также известны роботы, использующие принципы движения живых организмов - змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.

Робот Tuna
Система распознавания образов
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Математическая база

Робот Aibo
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов.
В июне 2009 года ученые Токийского университета представили человекоподобного робота «KOBIAN», способного выражать свои эмоции - счастье, страх, удивление, грусть, гнев, отвращение - с помощью жестов и мимики.

Робот KOBIAN
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Производители роботов
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших - iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводятся выставки роботов, напр. самая крупная в мире International robot exhibition (iRex) (проводится в начале ноября раз в два года в Токио, Япония).
Какие же роботы самые удивительные на сегодняшний день? И что они умеют делать без помощи человека? Это мы сегодня и расскажем нашим читателям.
1. Робот-марсоход Curiosity
Об этом "малыше" знают многие. Робот-марсоход Curiosity на сегодня самая дорогая разработка NASA. Его стоимость составила более 2 миллиардов долларов, и на создание умной машины было потрачено около десяти лет. Специализация Curiosity - собирать образцы грунта и различных пород с Марса и проводить опыты прямо на месте, отправляя результаты исследований ученым на Землю. Кроме того, робот может делать фотографии в высоком разрешении.
2. Geminoid DK

Хироши Исигуро и его подопечные из Japan’s Advanced Telecommunications Research Institute International создали уникального робота, которого невозможно отличить от человека. Прототипом внешности стал профессор Хенрик Шарфе. Робот Geminoid DK управляется дистанционно при помощи специальной технологии копирования движений. С первого раза сложно даже определить, что пере вами находится не человек.

Робот-рука способен рисовать уникальные портреты на основе сканирования лица. После этого, Paul начинает рисовать. Робот представляет собой механическую руку, в которую вставляется карандаш или ручка. Уникальность творения в том, что даже если перед Paul усадить два раза одного и того же человека, портреты получатся совершенно разными. Робот ухитряется точно передать выражение лица и эмоции сидящего перед ним.
4. WildCat

Творение компании Boston Dynamics представляет собой робота, который призван выполнять роль разведчика. На наш взгляд, для разведчика робот великоват и слишком уже заметен. Из преимуществ WildCat стоит отметить его способность передвигаться по пересеченной местности, разгоняться до 26 километров в час и бегать. В случае необходимости, робот останавливается и разворачивается. Конструкция робота очень устойчивая, придется постараться для того, чтобы он упал.
5. S-One

Созданный японской компанией Schaft, этот робот может работать в опасных и труднодоступных местах. S-One немного поход на человека, только меньше по размерам. Он устойчив и крепок, умеет поднимать тяжелые предметы, открывать окна и двери, использовать дрель. Сотрудники Schaft преуспели на поприще робототехники, поэтому S-One удался на славу. Функционал и объем возможных работ робота открывают перед людьми множество возможностей.
6. Row-bot

На сегодняшний день Row-bot не робот, а лишь его прототип. Однако идея заслуживает внимания общественности. Призвание будущего робота - убирать дно водоемов и уничтожать опасные микробы. Но самое интересное, что эти самые микробы становятся источником энергии для Row-bot. Такой себе бесконечный процесс.
7. Atlas

Робот нового поколения с красивым именем был создан сотрудниками компании Boston Dynamisc. Atlas был создан по подобию человека, и его функционал поражает воображение. Этот робот способен передвигаться по лесу с самым сложным рельефом. Он не падает и сохраняет равновесие там, где человек давно бы упал и сдался. Даже если Atlas попадет в зимний лес, он будет продолжать идти.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид
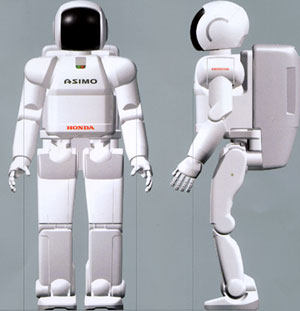
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
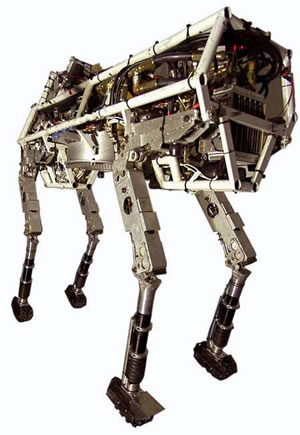
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
В современном мире нас всюду окружают машины и механизмы различных типов, однако роботы среди них пока еще довольно редкие гости. И это неудивительно, ведь главное отличие этих агрегатов от других - интеллект, который до сих пор в полной мере не познан самими создателями. И пусть современным роботам пока еще далеко до искусственных гуманоидов из фантастических романов и фильмов, но с каждым годом они становятся все более и более совершенными.
Рутинная работа, которая не требует творческого подхода, - это идеальное место для интеллектуальных машин.
Борьба с рутиной, безусловно, актуальное направление развития, но куда более важными являются сферы деятельности, сопряженные с непосредственной опасностью для жизни, поэтому полеты в космос стали одной из первых областей применения роботов. Именно здесь впервые были полноценно использованы дистанционно управляемые роботизированные станции, и чем дальше человек отправлял механических исследователей, тем более важной становилась возможность автономного принятия решений машиной. Ведь, скажем, даже до Луны сигнал с Земли идет с существенной задержкой, что уж говорить о Марсе или других планетах.
Если взглянуть глубже, основным назначением роботов, безусловно, является в первую очередь помощь человеку, в связи с чем они находят в нашей повседневной жизни все больше и больше применения.
Еще десять лет назад казалось фантастикой, что можно будет зайти в ближайший магазин бытовой электроники и купить там робота-уборщика, а теперь ползающие по квартире роботы-пылесосы уже стали привычными даже для домашних животных, которые с удовольствием используют их в качестве аттракционов.
Более того, сегодня уже используются роботы-официанты, роботы-повара в ресторанах, роботы-дворецкие и т. д. - мы расскажем вам о самых любопытных моделях.
1. Больше, чем игрушка
В 2008 году французская компания Aldebaran Robotics выпустила миниатюрного робота Nao . Этот почти игрушечный 57-сантиметровый аппарат оказался столь удачным, что разошелся по всему миру и стал основной платформой ежегодных соревнований RoboCup.
Помимо возможности свободно двигаться и общаться с хозяином с помощью речевых команд Nao обладает интерфейсом интерактивного программирования. С помощью специальной программы робота можно научить выполнять нужные операции в зависимости от заданных условий, например, принести какой-нибудь предмет.
2. Нескучный космос
Как ни странно, использование роботов в космосе не ограничивается лишь утилитарными функциями. Так, японское космическое агентство запустило на МКС робота Киробо , созданного с единственной целью - развлекать людей общением.
Томотака Такахаси, дизайнер из подразделения автоконцерна Toyota, создал Киробо по мотивам персонажа аниме «Астробой» (Astro Boy), знакомого каждому японскому мальчишке. Этот робот-собеседник не давал скучать японскому космонавту Коити Вакате во время его полета, завершившегося прошлой весной.
С тех пор уже сам механический Астробой пребывает на орбите в гордом одиночестве. Вернуть робонавта на Землю планируют в 2015 году.

3. Роботизированный ресторан
Ресторан в городе Куншан в КНР может похвастаться не только вкусной едой, но и очень оригинальным персоналом: вместо привычных официантов еду посетителям в нем разносят роботы . Кроме того, некоторые блюда также приготовлены роботами-поварами.
Владелец ресторана Сон Юган рассказывает, что занялся разработкой роботов по просьбе дочери, которая попросила его сделать робота-помощника по дому. По его словам, стоимость каждого робота составляет около 40 000 юаней, что не превышает годовую оплату обычного сотрудника. В то же время роботы - отличный способ привлечения в ресторан посетителей.

4. Роботы-дворецкие
В отеле «Алофт» в Купертино часть обязанностей персонала взяли на себя роботы A.L.O. , разработанные компанией Savioke. Так, если вам понадобится лишнее полотенце или тюбик зубной пасты, вам доставит ее весьма симпатичный электронный дворецкий. Этот робот взаимодействует с компьютерной системой отеля с помощью Wi-Fi и 4G, что позволяет ему удаленно вызывать лифты и находить нужные комнаты.

NesterOff
Робот (чеш. robot, от robota - подневольный труд, rob - раб), машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром. Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих мифах. Термин "робот" был впервые введён К. Чапеком в пьесе "R. U. R." (1920), где Роботами называли механических людей. В настоящее время робототехника превратилась в развитую область промышленности: тысячи промышленных роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта.
С развитием робототехники определились 3 разновидности Роботов:
Большинство современных Роботов (всех трёх разновидностей) - Роботы - манипуляторы , хотя существуют и другие виды Роботов (например, информационные, шагающие и т. п.). Возможно объединение Роботов первой и второй разновидностей в одной машине с разделением времени их функционирования. Допустима также совместная работа человека с Роботами третьего вида (в так называемом супервизорном режиме).
Первые Роботы ("андроиды" , имитировавшие движения и внешний облик человека) использовались преимущественно в развлекательных целях. С 30-х гг. в связи с автоматизацией производства Роботы - автоматы стали применять в промышленности наряду с традиционными средствами автоматизации технологических процессов, в частности в мелкосерийном производстве и особенно в цехах с вредными условиями труда.
Отсюда же можно получить информацию о термине "РОБОТИЗАЦИЯ":
Роботизация
- вытеснение людей из производительного процесса,
с заменой их на автоматизированные и роботизированные станки и производственные линии,
в связи с чем высвобождаются ресурсы для развития сферы услуг.

Промышленный Робот манипулятор имеет "механическую руку" (одну или несколько) и вынесенный пульт управления или встроенное устройство программного управления, реже ЭВМ. Он может, например, перемещать детали массой до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м), выполняя от 200 до 1000 перемещений в час. Промышленные Роботы - автоматы имеют преимущество перед человеком в скорости и точности выполнения ручных однообразных операций. Наиболее распространены Роботы манипуляторы с дистанционным управлением и "механической рукой", закрепленной на подвижном или неподвижном основании. Оператор управляет движением манипулятора, одновременно наблюдая её непосредственно либо на телевизионном экране; в последнем случае. Роботы снабжается "телевизионным глазом" - передающей телевизионной камерой. Часто Робот оснащают обучающейся автоматической системой управления. Если такому Роботу "показывают" последовательность операций, то система управления фиксирует всё в виде программы управления и затем точно воспроизводит при работе. Роботы-манипуляторы используют для работы в условиях относительной недоступности либо в опасных, вредных для человека условиях, например в атомной промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные Роботы-манипуляторы разнообразных конструкций и назначения: от глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской аппаратурой до подводных бульдозеров и буровых установок. Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
В конце 60-х гг. в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных Роботов. Такие Роботы имеют датчики очувствления (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) - специализированную ЭВМ с набором программ - и исполнительные механизмы (моторную систему). Действия интеллектуального Робота обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий Робота, которые реализуются исполнительными механизмами. К 1975 интеллектуальные Роботы находились в стадии научных разработок и попыток использования их в промышленности. Работы над искусственным интеллектом проводились также и в НИИ военно-промышленного комплекса.
Робот – это универсальный автомат, позволяющий выполнять механические действия. Его принципиальной особенностью является быстрая оперативная перестройка с одной выполняемой операции на другую. Существует несколько разновидностей роботов и для каждого из них имеется своё определение. Чаще всего говорят о трёх поколениях роботов: промышленных роботах или манипуляторах, адаптивных роботах и роботах с искусственным интеллектом или как говорили раньше – интегральных роботах.
Первые шаги робототехники

Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в области науки и техники. Появились и начали широко применяться различные электрические устройства, генераторы тока, электрические двигатели, аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала использоваться всё шире и шире. В начале 20 столетия начали интенсивно развиваться новые науки – радиотехника, электроника. Новые научные открытия и изобретения позволили проблему создания роботов перевести на новый, более совершенный фундамент. Появились реальные возможности оснастить робот зрением – фотоэлементами, слухом – микрофонами, речью – громкоговорителями.

В то же время начали появляться первые плоды науки, которая позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать устройства, которых, хоть и скромно называли кибернетическими игрушками, создавали отнюдь не для развлечения. Они служили примером практического воплощения идей автоматического управления, моделировали поведение живых организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые простейшие схемы таких устройств, способных двигаться в направлении света, разработал основатель кибернетики Н. Винер.
Наибольшую известность приобрели три “черепашки” , созданные английским биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства представляют собой самодвижущиеся электромеханические игрушки, способные ползти на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки разрядившихся аккумуляторов и тому подобное. “Черепашки ” приводятся в движение с помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель обеспечивает поступательное движение устройства, второй, расположенный на рулевой колонке, изменяет направление движения. Чувствительными элементами первых двух “черепашек ” Г. Уолтера являются фотоэлемент, расположенный на рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие. Управление поведением осуществляется с помощью несложной электронной схемы с обратной связью. Несмотря на очень простое устройство, “черепашки ” демонстрируют забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их обойти. Если имеется достаточно сильный источник света, они его скоро “замечают” и решительно направляются в его сторону (положительный тропизм). Однако подойдя к свету слишком близко, они от него отворачиваются (отрицательный тропизм). Теперь они двигаются вокруг источника света, находя для себя оптимальные условия и непрерывно поддерживая их (гомеостазис). Между двумя источниками света “черепашки ” совершают путешествия от одного к другому, наподобие буриданова осла, который, как известно, умер от голода, находясь между двумя одинаковыми копнами сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят” и “узнают” друг друга по зажженной лампочке и ползут друг другу навстречу.
Самые современные роботы
В аптеках Шанхая работают роботы-фармацевты
.
Надо просто нажать на сенсорный экран с описанием симптомов, и робот поставит
диагноз и даст необходимые рекомендации. Дальше остается только предложить
автомату купюру, и лекарство можно забирать.

Роботы-санитары.
Работают в некоторых британских больницах. Роботы производит сухую и влажную
уборку, сами выбрасывают мусор, заправляются чистящими средствами и
подзаряжаются. В отличие от живых уборщиц, никогда не бубнят
под нос и отличаются доброжелательным отношением к окружающим. Встретив кого-то
на своем пути, они извиняются и докладывают, чем они сейчас заняты.

В Южной Корее сконструировали сторожевого робопса для охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в случае обнаружения опасности. В критических случаях робот способен сам вызвать полицию.
Робот-фотограф.
Его называют «стоп-кадр» и используют для фотографирования людей на вечеринках и
других мероприятиях. Робот сам выбирает оптимальный ракурс и наводит объектив на
лица. Как правило, 90 процентов снимков, сделанных роботом, оказываются
удачными.

Японский семейный робот
.
Он запоминает до 7 членов семьи и распознает их по лицам или голосу. Словарный
запас – 65 тыс. фраз и 1000 отдельных слов. Он держит в памяти привычки каждого
члена семьи и пытается находить к каждому подход. Он краснеет в ответ на шутку и
бледнеет в замешательстве.
И еще одно изобретения японцев - Рободансер
.
Робот-танцор способен попеременно выдавать диско, панк, фанк, рок, хипхоп, брэйк
и т.д. Заряда батареи хватает на 45 минут. За это время робот предлагает
всевозможные движения для танцующих вокруг людей. В ушах у него стерео
микрофоны, которые улавливают малейшие звуки. В начале следующего года
планируется поставить таких роботов на ведущие дискотеки мира.

Механическая актиния.
Зачем это нужно, непонятно, но робот точно имитируют поведение морской актинии.
У него гибкое силиконовое тело, а пять щупалец чутко реагируют на освещение и
движения внутри и за стеклом аквариума. Напуганный робот-актиния уползает в
угол.
Мисс любезность
.
Это робот – личный помощник, которого можно возить с собой на симпозиумы и
конференции. Робот Грейс самостоятельно нашла дорогу в зал заседаний, не сбив
никого на своем пути, а в зале поприветствовала всех улыбкой и взмахом руки.
Робот постоянно совершенствуется и пополняет свой словарный запас. Грейс уже
может ездить на эскалаторе, понимает несложные фразы и пытается общаться.
Крысы-киборги:
американские ученые вживили микрочип в мозг крыс. Теперь крысами можно управлять
на расстоянии 500 метров. Предполагается, что киборги будут незаменимыми в
поиске людей, оказавшихся под завалами.

Ученые американского университета Карнеги сконструировали робота-старика . Это очень занимательный и милый андроид с чертами старого горемыки из русских народный сказок. Простенькая система интеллекта позволяет роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха, а главное его изобретение – это плитка шоколада. Наибольший восторг публики робот вызывает, когда просит простить его за старческий маразм.
«Робот – машина. В этом можно не сомневаться, хотя, наверное, некоторые люди будут воспринимать их как домашних животных, ибо такова человеческая природа. Только стандартизация дешёвых роботов общего назначения поможет нам ещё глубже осознать бесконечное разнообразие типов человеческой внешности и поведения. Будем надеяться, что это поможет нам быть терпимее друг к другу». Дж. Янг.
Три закона робототехники для роботов
Первый Закон:
Робот
не может причинить вред человеку или своим бездействием
допустить, чтобы человеку был причинен вред.
Второй Закон:
Робот
должен повиноваться командам человека, если эти команды не
противоречат Первому Закону.
Третий Закон:
Робот
должен заботиться о своей безопасности, поскольку это не
противоречит Первому и Второму законам.
Законы для роботов сформулировал Айзек Азимов в своём произведении "Три закона робототехники (Айзек Азимов)
".



